
Введение
Современные информационно управляющие комплексы создаются на базе программируемых цифровых вычислительных средств, обладающих достаточно большими вычислительными ресурсами и высокой производительностью. Это создаёт предпосылки для перехода при проектировании систем управления от профессионального программирования с использованием языков высокого уровня и связанных с этим оригинальных решений программистов к прикладному программированию с использованием унифицированных стандартных решений, понятных системным интеграторам и разработчикам систем управления.
В соответствии с требованиями стандарта МЭК 61131 3 при программировании промышленных систем управления технологическими процессами рекомендуется применять графические языки функциональных блоков (ФБ), релейных схем (РС), граф схем и др. Наибольшее распространение среди разработчиков систем управления получил графический язык функциональных блоков – мнемонических изображений типовых операций, например логических функций «И» и «ИЛИ», «Задержка времени», «Блок нелинейности» и т.д.
В настоящее время целым рядом зарубежных и отечественных фирм предлагаются системы программирования программно логических контроллеров SoftPLC и SCADA системы GENESIS32 (компания Iconics), CoDeSys 3.0 (3S – Smart Software Solutions), Trace Mode (AdAstra) для Windows, программные пакеты RTWin (SWD Software), RealFlex (RealFlex Systems), ISaGRAF (CJ International), DACHS (Steinhoff) для QNX и др. С методологической точки зрения инструментально технологические системы разработки программного обеспечения (ПО) можно разделить на две группы: системы, основанные на компиляционном методе, и системы, в основу которых положен интерпретационный метод. В системах первой группы на основе анализа графического изображения алгоритма управления синтезируется исходный текст программы, а в системах второй группы синтезируются таблицы настройки, посредством которых инициализируется стандартный код программы на реализацию конкретного алгоритма функционального управления объектом. Каждый из этих методов имеет свои достоинства и недостатки, рассмотрение которых выходит за рамки данной публикации.
В настоящей статье рассматривается система программирования Dlogic v. 2.0, разработанная в ФГУП НПО «Аврора» (г. Санкт Петербург) [1]. Эта система предназначена для программирования судовых информационно управляющих комплексов (ИУК), реализованных на аппаратно программных средствах фирм Advantech, SBS Technologies и др. Также система Dlogic v. 2.0 широко применяется для моделирования объектов управления на испытательных стендах при отладке и сдаче систем управления.
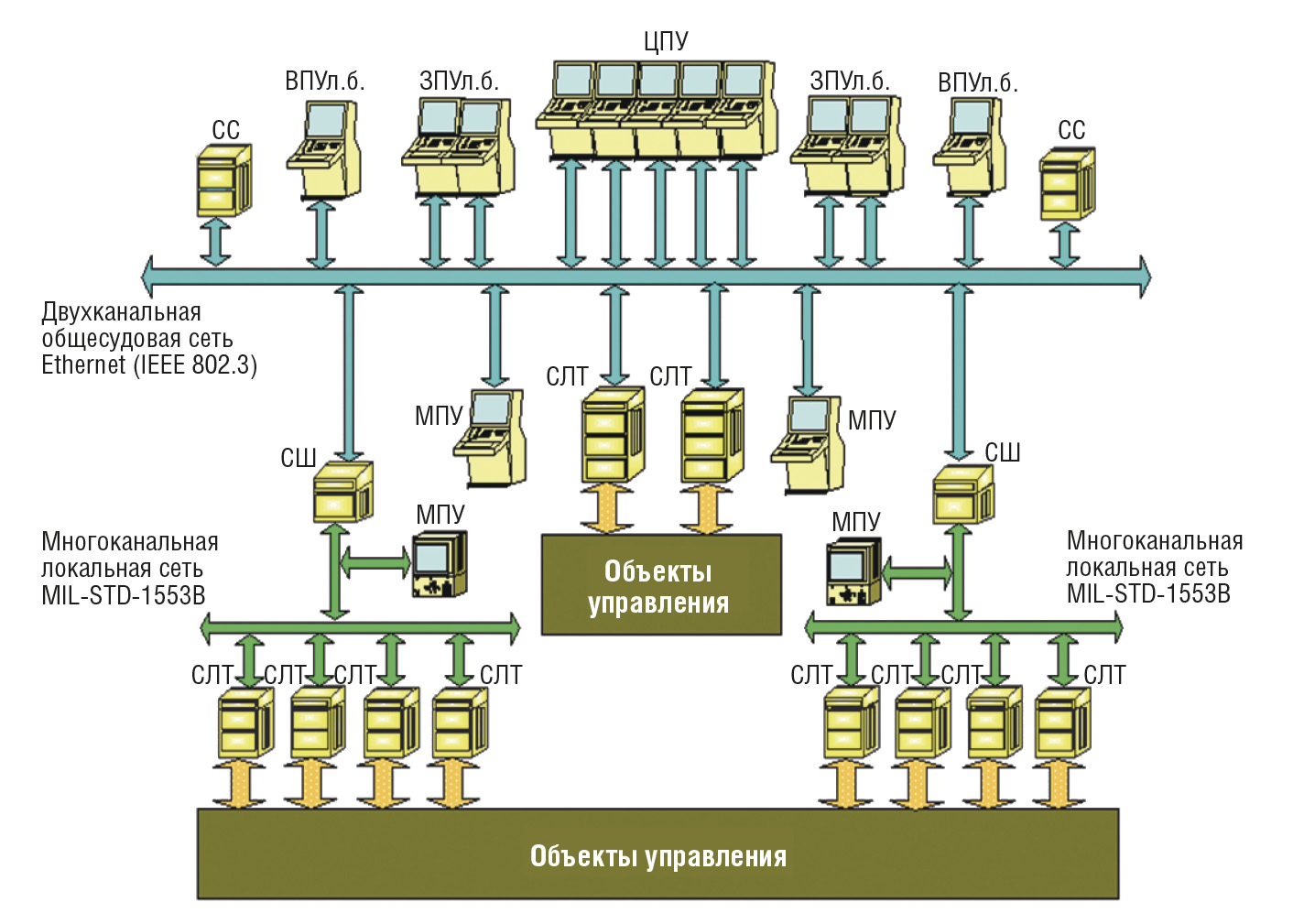
Условные обозначения: ЦПУ (ЗПУ, ВПУ, МПУ) – центральный (запасной, выносной, местный) пульт управления; СЛТ – станция локальная технологическая; СС – сетевой сервер; СШ – сетевой шлюз.
Обобщённая структура ИУК изображена на рис. 1, а на рис. 2 показан общий вид испытательного стенда, выполненного на базе аппаратных средств фирмы Advantech.

Структура системы Dlogic v. 2.0
Система Dlogic v. 2.0 разработана в соответствии со стандартом МЭК 61131 3 с использованием языка ФБ на основе интерпретационного метода. Это интегрированный пакет инструментально технологических программ, позволяющий в единой технологической среде осуществлять разработку, отладку и моделирование всех составляющих программного обеспечения (баз данных, алгоритмов управления и контроля, протоколов сетевого обмена, видеокадров и др.) и объединять эти составляющие в едином проекте системы.
Система Dlogic v. 2.0 предоставляет единые инструментальные средства как для разработки ПО операторских станций, так и для программирования локальных технологических станций (CЛT), обеспечивая разработку распределённой комплексной системы управления как единого проекта. Встроенные протоколы обеспечивают обмен данными с использованием физических интерфейсов Ethernet (IEEE 802.3), MIL STD 1553B и RS 485.

Условные обозначения: САПР ФПО – система автоматизированного проектирования функционального программного обеспечения; СПОС РВ – специализированная прикладная операционная система реального времени; ФОП – файл описания проекта; ПВП – подсистема ведения проектов ФПО; БИД – базы исходных данных; ПФБИД – подсистема формирования баз исходных данных; ППФСА – подсистема проектирования функциональных схем алгоритмов (ФСА) управления; ФГИ ФСА – файлы с описаниями графических изображений ФСА; ППВК – подсистема проектирования видеокадров; ФГИ ВК – файлы с описаниями графических изображений видеокадров; ПГТН – подсистема генерации таблиц настройки для СПОС РВ; ТН МПО – таблицы настройки межприборного обмена данными; ТН ЛС – таблицы настройки логического сервера; ПМО – подсистема моделирования и отладки ПО.
Инструментально технологическая система Dlogic v. 2.0 состоит из двух программных комплексов (рис. 3):
-
системы автоматизированного проектирования функционального программного обеспечения (САПР ФПО);
-
специализированной прикладной операционной системы реального времени (СПОС РВ).
Процесс проектирования ФПО с использованием программных средств системы Dlogic v. 2.0 заключается в автоматизированном формировании таблиц и файлов настройки СПОС РВ на реализацию конкретных алгоритмов функционального управления техническими средствами, а именно:
-
алгоритмов вычисления управляющих воздействий на объект управления;
-
алгоритмов вывода на экран дисплея видеокадров с информацией, характеризующей состояние и параметры технических средств и самой системы управления;
-
алгоритмов, реализующих протоколы обмена данными между вычислительными приборами в проектируемой системе.
Структура САПР ФПО
В состав САПР ФПО входят следующие программные подсистемы:
-
подсистема ведения проектов ФПО (ПВП);
-
подсистема формирования баз исходных данных (ПФБИД);
-
подсистема проектирования функциональных схем алгоритмов (ФСА) управления (ППФСА);
-
подсистема проектирования видеокадров (ППВК);
-
подсистема генерации таблиц настройки для СПОС РВ (ПГТН);
-
подсистема моделирования и отладки ПО (ПМО).
Результатами проектирования, получаемыми посредством САПР ФПО, являются:
-
файл описания проекта (ФОП);
-
базы исходных данных (БИД);
-
файлы с описаниями графических изображений ФСА (ФГИ ФСА);
-
файлы с описаниями графических изображений видеокадров (ФГИ ВК);
-
таблицы настройки межприборного обмена данными (ТН МПО);
-
таблицы настройки логического сервера (ТН ЛС).
Разработка ФПО осуществляется на IBM РС совместимом компьютере с ОС Windows 2000/ХР. Удалённая загрузка ФПО в вычислительные приборы проектируемой системы управления производится через локальную сеть Ethernet.
Структура СПОС РВ
СПОС РВ представляет собой исполнительную программу, реализующую алгоритмы управления объектом. Основной отличительной особенностью СПОС РВ является то, что кодовая часть программы является стандартной, не зависящей от реализуемых в её среде алгоритмов функционального управления. На реализацию конкретных алгоритмов она настраивается с помощью таблиц, формируемых посредством САПР ФПО и содержащихся в сегменте данных.
То обстоятельство, что кодовая часть СПОС РВ является стандартной и не зависит от алгоритмов управления, является чрезвычайно важным, так как позволяет, во первых, существенно повысить качество и надёжность ПО, а во вторых, сократить сроки и затраты на разработку и сопровождение ПО в процессе эксплуатации систем управления.
СПОС РВ состоит из следующих основных программных подсистем:
-
базовая операционная система реального времени (ОС РВ) QNX v. 4 или v. 6;
-
драйверы устройств ввода вывода;
-
логический сервер;
-
графический сервер;
-
сетевой сервер.
Каждый из серверов состоит из головной управляющей программы и библиотеки отдельных подпрограмм функций, реализующих под управлением головной программы типовые фрагменты функциональных задач соответствующего сервера.
Логический сервер
Логический сервер является основной программой СПОС РВ. Именно в среде логического сервера реализуется главная задача функционального управления объектом – расчёт управляющих воздействий на аппаратуру объекта управления (ОУ). Библиотека подпрограмм логического сервера состоит из
-
библиотеки программ начальной инициализации логического сервера;
-
библиотеки программ, управляющих процессом сборки алгоритма вычисления управляющих воздействий на ОУ или представления информации о состоянии ОУ на монитор;
-
библиотеки подпрограмм функций типовых ФБ.
Взаимодействие программ логического сервера между собой осуществляется через разделяемую память.
Взаимодействие программ логического сервера с программами графического сервера, а также с программами сетевого сервера и программами ввода вывода инструментальной информации осуществляется на основе заявок на изменения параметров отображения тех или иных графических объектов, на передачу пакета с данными по магистрали межприборного обмена и т.д.
Графический сервер
В среде графического сервера реализуется графический интерфейс пользователя. Его программами реализуются следующие функции системы:
-
поддержка видеокадров, баз данных реального времени и изображений функциональных схем алгоритмов;
-
ввод с экрана монитора команд дистанционного управления оборудованием объекта посредством различного типа виртуальных кнопок и всплывающих меню;
-
вывод на мониторы операторских станций текстовых сообщений и их регистрация;
-
вывод на экран монитора окна со списком событий и их регистрация;
-
представление в графической форме аналоговых параметров и их регистрация.
Программа управления процессом вывода на экран монитора последовательности графических объектов, приёма сигналов управления от этих графических объектов и передачи их логическому серверу функционирует на основе данных настройки, содержащихся в файле описания видеокадров, сформированном в САПР ФПО.
Сетевой сервер
Программами сетевого сервера реализуется информационное взаимодействие между вычислительными приборами системы по магистралям двух типов:
-
шестиканальной магистрали обмена данными на основе интерфейса MIL STD 1553B;
-
дублированной магистрали обмена данными на основе интерфейса Ethernet с использованием протокола ТСP/IP.
Построение системы обмена информацией на основе шестиканальной магистрали MIL STD 1553B позволяет не только обеспечить практически 100 процентную её безотказность, но и существенно повысить быстродействие проектируемых систем.
Библиотека программ сервера состоит из
-
программы инициализации межприборного обмена;
-
программы формирования пакета с данными для передачи по магистрали;
-
программы управления процессом передачи информации;
-
программы приёма информации.
В магистралях всех типов обеспечена диагностика состояния каналов обмена. В случае потери связи с абонентом в конкретном канале программные средства абонента источника формируют соответствующий признак исправности/неисправности, доступный программам логического сервера.
Примеры применения системы Dlogic v. 2.0
В настоящей статье в качестве примеров применения системы Dlogic v. 2.0 для программирования судовых систем управления рассмотрены система автоматизированного управления и контроля перекачки топлива в топливной системе судна и система управления судном по курсу.
Пример 1. Система управления перекачкой топлива
Мнемосхема топливной системы, отображаемая на мониторе операторской станции в системе Dlogic v. 2.0, представлена на рис. 4.

На этом рисунке изображено шесть запасных цистерн ЦЗТ№1…ЦЗТ№6, расходная цистерна ЦРТ, управляемая арматура (клапаны заполнения 1з...7з, клапаны 8 и 9 для приёма топлива с берега и расходные клапаны 1р...7р), две насосные станции, каждая из которых состоит из двух дублированных насосов H1 H2 и H3 H4 соответственно.
Математическая модель топливной системы описывается системой логических и дифференциальных уравнений:
-
динамики изменения уровня топлива в ЦЗТ;
-
динамики изменения уровня топлива в ЦРТ;
-
производительности и состояния насосов;
-
динамики изменения давления за насосами.
На рис. 5 в качестве примера показана функциональная схема модели ЦРТ.

Автоматическое заполнение ЦРТ осуществляется перекачивающими насосами H1 или H2 при понижении уровня топлива в ЦРТ ниже предельно допустимого значения, наличии топлива в одной из запасных цистерн ЦЗТ, а также при открытых клапанах 7з и одного из группы 1р...6р. Функциональная схема алгоритма управления насосом Н1 представлена на рис. 6.

На рис. 7 приведены результаты моделирования процесса автоматического управления насосами Н1 и Н2 при заполнении расходной цистерны из четырёх запасных цистерн одновременно в нормальном и аварийном режимах работы (на рисунке показано изменение уровня только в одной из четырёх задействованных запасных цистерн — в ЦЗТ№6).

При включении режима автоматического управления насосами АУ осуществляется запуск основного насоса Н1 и устанавливается рабочее давление за этим насосом Pressure1, с этого момента начинается процесс заполнения расходной цистерны и повышение уровня топлива в ней FDTLevel. Уровень топлива Level6 в запасной цистерне ЦЗТ№6, из которой перекачивается топливо в расходную цистерну, уменьшается. При возникновении аварийной ситуации, связанной с падением давления топлива за насосом Н1 (Pressure1) ниже установленного значения, система управления с временной задержкой 5 с, необходимой для исключения ложных срабатываний датчика давления и случайных колебаний давления топлива, запускает резервный насос Н2 и поднимает давление перекачки топлива до нормального значения. Затем при выполнении определённых условий система управления отключает насос Н1 и переводит его в резервный режим. Процесс заполнения расходной цистерны продолжается до достижения установленного предельного верхнего уровня, после чего насос Н2 останавливается и процесс перекачки топлива из запасной цистерны в расходную цистерну прекращается.
Пример 2. Система управления судном по курсу
Система Dlogic v. 2.0 может также успешно использоваться при программировании цифровых систем непрерывного управления в жёстком реальном времени, таких, например, как системы управления судном по курсу [2].
На мониторе системы (рис. 8) в графическом виде отображаются дата и время, осадка, крен, курс и скорость хода судна, положение рулей, состояние навигационных систем, рулевых машин, главных двигателей и системы электропитания, а также задаются режимы управления (автоматический, следящий или дистанционный), загрузка судна (порожний или гружёный), параметры волнения и курсовой угол к волне и др.


На рис. 9 представлены результаты моделирования процесса автоматической стабилизации судна на заданном курсе (Fi(t) = 0 град.) при движении со скоростью 25 м/с. Здесь приняты следующие обозначения: Fi [±180 град.] – ошибка стабилизации (отклонение судна от заданного курса); ВЕТА [±5 град.] – угол дрейфа; OMEGA [±5 град./c] – угловая скорость циркуляции судна по курсу; DELTA [±35 град.] – угол перекладки рулей направления. Начальные значения параметров движения судна (t = 0) составляют Fi(0) = 90 град., ВЕТА(0) = 0 град., OMEGA(0) = 0 град./с, DELTA(0) = 0 град. Внешнее возмущающее воздействие на судно, эквивалентное перекладке рулей на +20 градусов, учтено в математической модели динамики движения судна, реализованной в системе Dlogic v. 2.0 в виде функциональных схем. Как видно из осциллограмм, представленных на рис. 9, система управления судном по курсу устраняет начальную ошибку и обеспечивает стабилизацию судна на заданном курсе (Fi(t) = 0 град.). Вместе с тем обеспечивается астатизм системы управления при действии внешних возмущений за счёт соответствующей перекладки рулей (DELTA(t) = –20 град.), компенсирующей эти воздействия.
Заключение
Как видно из приведённых примеров, система Dlogic v. 2.0 обеспечивает выполнение целого комплекса задач, связанных с программированием судовых информационно управляющих комплексов. При этом она обеспечивает работу систем управления в жёстком реальном времени с циклом не более 20 мс.
Система Dlogic v. 2.0 прошла стендовые испытания, имеет документацию на русском языке и внедрена в ряде систем управления судовыми энергетическими установками, что позволяет рекомендовать её для программирования широкого класса судовых информационно управляющих комплексов различного назначения.
В настоящее время продолжаются работы по дальнейшему развитию системы Dlogic v. 2.0. Они направлены на расширение библиотек функциональных блоков и графических объектов. ●
Литература
-
Василенко В.С., Тотьменинов Л.В. Система автоматизированного проектирования DLogic v. 2.0 функционального программного обеспечения автоматизированных систем управления технологическими процессами // Системы управления и обработки информации. 2002. Вып. 4 5. — СПб. : ФГУП НПО «Аврора».
-
Корчанов В.М., Василенко В.С., Черныш Ю.Н. Моделирование систем управления движением судов по курсу // XXXIV сборник трудов Междуведомственного совета по управлению движением морских судов и специальных аппаратов. — М. : ИПУ РАН, 2007.
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





