
Введение
Одним из основных качеств современных комплексов обнаружения источников радиоизлучения (ИРИ) воздушного, наземного и морского базирования, обеспечивающих скрытность работы и повышение живучести, является отсутствие их главного демаскирующего признака – собственного излучения. В связи с этим разработка пассивных комплексов обнаружения ИРИ, работающих исключительно по излучению бортовых РЭС, является актуальной задачей.
В данной статье предлагается реализация системы цифрового приёма и обработки радиосигналов для работы в составе комплекса пассивной моноимпульсной радиолокационной станции.
Назначение и функции системы
Система предназначена для работы в составе комплекса пассивной моноимпульсной радиолокационной станции с целью обнаружения и определения местоположения, курса и параметров движения источников радиоизлучения воздушного, наземного и морского базирования.
Система имеет централизованную архитектуру, управляемую от центрального компьютера, на котором реализуются обработка радиолокационной информации, взаимодействие с рабочим местом оператора, получение данных и управление режимами функционирования комплекса, а также сопряжение с внешними системами.
Разработанная система обеспечивает:
-
обнаружение непрерывных и квазинепрерывных радиосигналов на промежуточной частоте (до четырёх одновременно с неперекрывающимися полосами в полосе 40 МГц) с уровнем от минус 15 дБ до плюс 40 дБ относительно уровня собственных шумов;
-
определение параметров обнаруженных радиосигналов (центральной частоты, эффективной полосы, мощности, спектра, длительности, времени обнаружения, периода следования импульсов, закона внутриимпульсной модуляции);
-
определение координат источников обнаруженных радиосигналов;
-
документирование и архивацию информации;
-
самоконтроль.
Выполнение указанных задач производится в режиме реального времени.
Состав системы и обзор возможных вариантов её реализации
Технические характеристики сигнала на выходе модуля промежуточной частоты, являющегося составной частью комплекса, приведены в табл. 1. Эти характеристики позволили сформировать критерии для выбора модулей цифрового приёма и обработки сигналов.

Исходя из основной задачи реализации данной системы с целью проверки разработанных технических решений (алгоритмов и программного обеспечения), выбор устройств для построения её аппаратной части был произведён среди готовых модулей, представленных на рынке такими фирмами, как Nallatech, Xilinx, «Инструментальные системы», Signatec. Наилучшее соотношение технических характеристик и стоимости было представлено компанией Signatec.
Компания Signatec специализируется на разработке IBM РС совместимых плат и систем высокоскоростного ввода-вывода для таких приложений, как радарные системы, неразрушающий контроль, спектроскопия и других, требующих обработки большого объёма данных в реальном времени. Согласно анонсированным компанией Signatec данным, пропускная способность плат серии PDA достигает 500 Мбайт/с и рассматривается возможность достижения значения 1 Гбайт/с, а параллельное применение нескольких таких плат позволяет получить ещё более впечатляющие значения интегральной производительности. Кроме плат, которые могут быть установлены в любой IBM РС совместимый компьютер, компания Signatec поставляет измерительные комплексы IC1000D с массивом памяти для хранения до 18 терабайт данных. Основанные на специализированной шине SAB, эти системы могут в реальном времени обрабатывать потоки данных и телеметрии объёмом до 2 гигабайт в секунду.
На основе проведённого анализа модулей цифрового приёма и обработки компании Signatec был скомпонован блок (крейт), ключевыми компонентами которого стали:
-
корпус IPC-611 MB-00X/PS-400 ATX-ZB фирмы Advantech;
-
кросс-плата PCE-7B13-64B1E (4´PCI, 6´PCI-X 64 бит/66 МГц) фирмы Advantech – 1 шт.;
-
одноплатный компьютер PCE-5120 (PICMG 1.3, Intel 945G) фирмы Advantech с центральным процессором Intel® Core™ 2 Duo E6400 (2,13 ГГц) – 1 шт.;
-
платы ввода данных (аналого-цифрового преобразования) PDA16-60-120-MS компании Signatec – 2 шт.;
-
платы цифровой обработки сигналов PMP1000-2 компании Signatec – 2 шт.
Приведённый состав аппаратной части разрабатываемой системы по оценкам разработчиков позволял реализовать масштабируемую, гибкую и стабильную систему обработки.
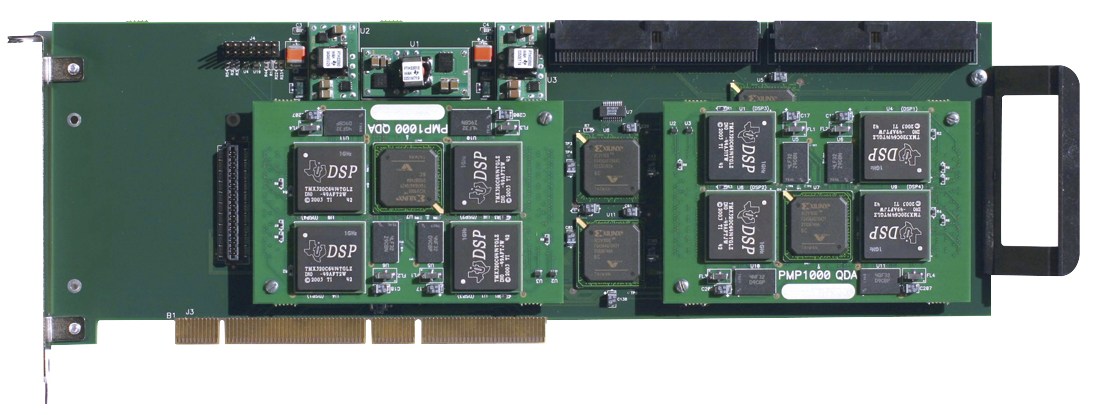
Далее представлены основные технические характеристики платы аналого-цифрового преобразования PDA16-60-120-MS (рис. 1) и платы цифровой обработки сигналов PMP1000-2 (рис. 2).
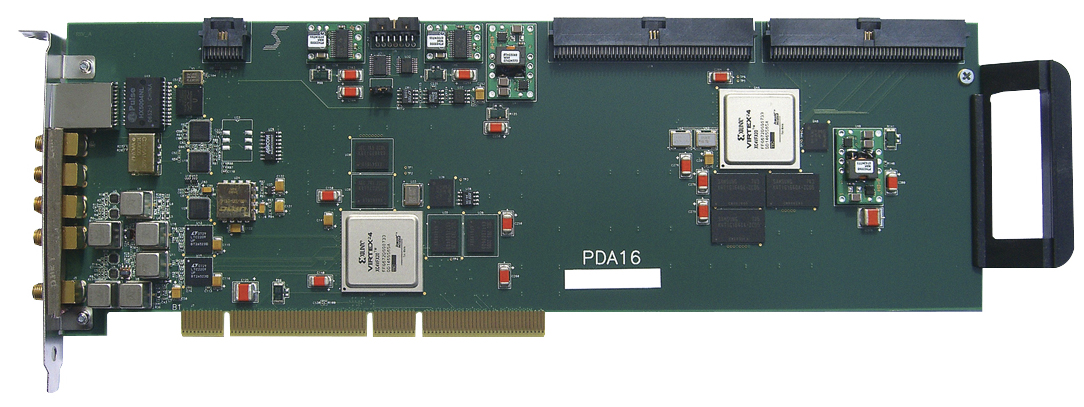
PDA16-60-120-MS
-
Тип разъёмов входных сигналов, сигналов запуска, тактового и выходного сигналов: SMA.
-
Шкала напряжений входных сигналов: 2,50 В; 1,67 В; 1,00 В; 667 мВ; 400 мВ; 267 мВ.
-
Входное сопротивление: 50 Ом.
-
Разрядность: 16 бит.
-
Частота оцифровки: до 160 МГц.
-
Пользовательская ПЛИС: Virtex-4 FX60 или FX35 (зависит от модификации платы).
-
Ширина полосы входного сигнала: 50 МГц.
-
Частота сигнала внешнего тактирования: 10–160 МГц.
-
Высокоскоростная параллельная шина SAB: 500 Мбайт/с, в зависимости от области применения возможно до 1 Гбайт/с (64 бит/125 МГц).
-
Внешняя шина: 64-разрядная шина PCI-X (до 100 МГц).
-
Потребляемая мощность: +12 В, 400 мА; +5 В, 1,5 A; +3,3 В, 2,3 A.
PMP1000-2
-
Количество процессоров: 9 Texas Instruments 320С6414.
-
Тактовая частота процессоров: 1 ГГц.
-
Объём внутренней памяти: 576 Мбайт (64 Мбайт SDRAM на каждый процессор).
-
Пропускная способность шины SAB: 500 Мбайт/с, в зависимости от области применения возможно до 1 Гбайт/с (64 бит/125 МГц).
-
Внешняя шина: 64-разрядная шина PCI-X (до 100 МГц).
Распределение аппаратных ресурсов и структура системы
Исходя из поставленных при разработке системы задач, распределение аппаратных ресурсов целесообразно выполнить следующим образом:
-
PDA16-60-120-MS (2 шт.) – формирование цифрового потока данных с четырёх каналов моноимпульсной РЛС, спектральный анализ, преобразование частоты, фильтрация, измерение амплитуды во временно́й области, определение закона модуляции сигналов;
-
PMP1000-2 (2 шт.) – измерение параметров сигналов во временно́й области, буферизация данных, формирование кодограмм обнаруженных сигналов;
-
управляющий компьютер на базе платы PCE-5120 (1 шт.) – управление модулями обработки сигналов PDA16-60-120-MS и PMP1000-2, решение задачи местоопределения источников сигналов, запись формуляров обнаруженных сигналов, интерфейс с оператором, передача/приём данных между блоками комплекса.
Структурная схема рассматриваемой системы представлена на рис. 3.

Условное обозначение: МШУ – малошумящий усилитель.
Приведённое распределение аппаратных ресурсов позволяет получить высокопроизводительную систему обработки сигналов и чёткую синхронизацию работы всех её модулей.
С целью предварительной оценки возможностей выполнения системой функциональных задач проведено моделирование с использованием пакетов MatLab 6.5, Microsoft Visual C++ 6.0, Code Composer Studio 6000 следующих алгоритмов цифровой обработки сигналов:
-
калибровки АЧХ приёмно-усилительного тракта (для обеспечения требуемой точности определения координат ИРИ);
-
измерения параметров сигналов (центральной частоты, ширины спектра, времени прихода, амплитуды сигнала, длительности импульсов, периода следования импульсов, законов модуляции и параметров внутриимпульсной модуляции, числа скачков фазы) – на основании полученных данных выполняется расчёт местоположения, курса и скорости ИРИ;
-
регистрации, документирования и архивации информации, а также алгоритмов сопряжения с внешним потребителем (приём команд управления и выдачи формуляров, определяющих ИРИ).
Структура и описание алгоритмов цифровой обработки сигналов
Структурная схема цифровой обработки приведена на рис. 4.

Алгоритмы цифровой обработки сигналов, реализованные в рассматриваемой системе, можно разделить на две части.
-
Линейная обработка. В этой части производятся преобразование частоты, а также определение спектральных характеристик, закона модуляции, уровня сигнала, временны́х характеристик поступающих сигналов. Для корректной линейной обработки уровень сигнала должен быть не менее плюс 15 дБ относительно собственного шума.
-
Корреляционная обработка. Используется для обнаружения, измерения уровня и временны́х характеристик сигналов. Уровень сигнала должен быть до минус 15 дБ относительно собственного шума.
Линейная обработка. Первоначальное обнаружение сигналов производится в спектральной области. БПФ на 1024 точки в связке со сложным адаптивным порогом позволяет получить динамический диапазон обнаружения до 60 дБ. Также по БПФ производятся оценка частоты настройки цифрового преобразователя частоты и оценка необходимой полосы пропускания цифрового перестраиваемого фильтра. Далее для сигнала, полученного с выхода преобразователя частоты и цифрового фильтра, производятся необходимые измерения. Измеряемыми параметрами сигнала являются уровень, эффективная ширина спектра, центральная частота спектра, длительность, период повторения импульсов, закон модуляции и связанные с ним параметры – девиация фазы (при фазовой модуляции), глубина амплитудной модуляции, девиация частоты (при частотной модуляции), скважность и длительность импульсов при импульсной модуляции. Для более надёжного обнаружения сигналов, а также более точного определения временны́х параметров в схему введён адаптивный порог во временной области.
Корреляционная обработка. Обнаружение сигналов корреляционным методом имеет значительные преимущества, так как позволяет скомпенсировать часть внутренних шумов каждого из каналов, а также использовать длительное накопление сигнала, что в конечном итоге создаёт условия для расширения динамического диапазона обнаруживаемых сигналов. Динамический диапазон зависит непосредственно от размера временно́го окна, в котором производится накопление сигнала, при этом верхний предел размера окна устанавливается, исходя из требований к полосе пропускания корреляционного обнаружителя, и может динамически изменяться в процессе работы.
Программные коды для двух каналов приёмника размещены в ПЛИС, занимая при этом около 70% общей логики и 100% умножителей (XtremeDSP Slices).
Результаты обработки сигналов (формуляры, содержащие полную информацию об обнаруженных сигналах) передаются из плат PDA16-60-120-MS по шине на процессорные платы PMP1000-2, где реализованы алгоритмы, извлекающие информацию о периодических сигналах, вторичная обработка радиолокационной информации, а также хранение и буферизация выходной информации перед передачей на рабочую станцию.
Для отладки программного обеспечения (ПО) ПЛИС использовался пакет Xilinx ISE совместно с ChipScope Pro, позволяющий вести диагностику ПО непосредственно в процессе работы устройства. Создание блоков БПФ, а также тригонометрических преобразований выполнено с помощью встроенной в Xilinx ISE утилиты Core Generator.
Оборудование рабочего места в процессе проведения испытаний системы показано на рис. 5.

Внешний вид аппаратной части разработанной системы цифрового приёма и обработки радиосигналов пассивной моноимпульсной радиолокационной станции приведён на рис. 6.

Некоторые особенности плат PDA16-60-120-MS и PMP1000-2 и соответствующие технические решения
В процессе устранения проблем совместимости различных частей аппаратного комплекса и достижения требуемой производительности системы были выявлены некоторые особенности плат PDA16-60-120-MS и PMP1000-2 и выработаны соответствующие технические решения, оптимизирующие их применение.
1. При первом включении комплекса обнаружилось, что совместная работа плат ввода данных PDA16-60-120-MS и плат обработки данных PMP1000-2 не обеспечивалась на одном контроллере PCI-X. Смена режимов работы PCI-X, частот, прерываний к положительному результату не привела. Для решения данной проблемы разделили платы PDA16-60-120-MS и PMP1000-2, подключив платы ввода данных на один контроллер, а платы обработки данных – на два других контроллера.
2. Серьёзные трудности возникли при расчёте взаимных корреляционных функций (ВКФ) сигналов в каналах, находящихся на разных платах ввода данных. Для реализации ВКФ необходимо объединение в одном вычислительном модуле сигналов со всех четырёх каналов АЦП. Однако реализовать это не удалось. Основная причина этого в том, что в настоящее время в платах PMP1000-2 не реализована возможность приёма данных по высокоскоростной шине SAB одновременно от двух плат ввода данных. Целесообразность обеспечения такой возможности в ближайшем будущем разработчиками Signatec не вызывает сомнений. Нам же пришлось искать своё решение, и оно было найдено на основе использования непосредственно шины SAB и физических уровней сигналов на ней с разработанным нашей фирмой протоколом передачи данных.
3. Ряд особенностей рассматриваемых модулей связан с их быстродействием и пропускной способностью шин передачи данных. В условиях нашего применения значения 1 Гбайт/с для скорости обмена данными по шине SAB достичь не удалось и на практике было получено только паспортное значение порядка 500 Мбайт/с. Кроме того, при приёме и обработке сигналов в реальном времени было выявлено, что плата PMP1000-2 не справляется с приёмом и обработкой потока отсчётов входного сигнала на уровне 380 Мбайт/с. Архитектура этой платы подразумевает, что управляющий процессор коммутирует потоки данных и распределяет задачи между остальными 8 процессорами, однако именно управляющий процессор и является слабым звеном данной архитектуры. С целью снижения потока данных, то есть передачи готовых формуляров, а не временны́х отсчётов сигнала, часть обработки перенесена в ПЛИС.
4. Интересным решением при разработке системы стала реализация синхронного непрерывного запуска АЦП на плате PDA16-60-120-MS.
Следует отметить, что запуск АЦП на плате PDA16-60-120-MS реализован тремя способами: по внешнему сигналу запуска, от импульса компаратора, настраиваемого по уровню входного сигнала, или программно (установкой бита запуска в регистре). В связи с отсутствием источника внешнего сигнала запуска рассматривались второй и третий способы синхронного запуска АЦП на двух платах PDA16-60-120-MS.
При решении задач обнаружения сигналов при отношении сигнал/шум << 1 и необходимости обеспечения широкого амплитудного динамического диапазона (то есть в условиях, когда усиление входного тракта нельзя устанавливать высоким для исключения его перегрузки) в случае реализации второго способа осуществить синхронный запуск АЦП на двух платах PDA16-60-120-MS не представляется возможным по причине преобладания шумовой компоненты в сигналах различных каналов.
Использование программного запуска АЦП (третий способ) в чистом виде на двух платах PDA16-60-120-MS не позволяло добиться единовременного начала их работы, что определялось временной задержкой выполнения программного кода. Кроме того, программный запуск АЦП реализован для получения ограниченного пакета данных и не позволяет получать данные непрерывно.
Для решения данной проблемы была разработана следующая схема запуска. Сигнал внешнего запуска первой платы соединён с цифровым выходом триггера запуска второй платы. Первая плата ввода после инициализации входит в режим ожидания сигнала внешнего запуска. После инициализации второй платы на ввод данных и получения импульса запуска от компаратора, настроенного на нулевой уровень входного сигнала, вторая плата переключается в режим приёма и одновременно по внешнему сигналу переключает в режим приёма первую. Для повышения надёжности принимаемых данных тактовые сигналы всех АЦП засинхронизированы, для чего у плат PDA16-60-120-MS присутствуют внутренние и внешние входы/выходы синхронизации.
При анализе работы АЦП также отмечен повышенный уровень помех (сигналов с частотами 33,3; 25 МГц и уровнем до минус 65 дБ относительно максимума шкалы), изменяющийся при переключении шкалы АЦП.
5. Особенностью рассматриваемых плат является и то, что в них не предусмотрена возможность прошивки через шину PCI. Реализация такой возможности позволила бы отказаться от использования внешних программаторов и частых переключений программатора от одной платы к другой, что значительно сократило бы время прошивки и сделало бы отладку системы более удобной.
Также хотелось бы отметить целесообразность реализации на всех платах высокоскоростной цифровой шины, например Ethernet, и универсальной низкоскоростной шины, например EIA-485 или EIA-422, что позволило бы управлять внешней аппаратурой с плат цифровой обработки сигналов, минуя все проблемы и задержки, связанные с операционной системой компьютера.
В целом стоит отметить высокую производительность и универсальность рассмотренных плат компании Signatec, а также хорошо продуманные, с точки зрения программиста, драйверы. На основе подобных высокоинтегрированных плат легко наращивать мощность вычислительной системы для достижения более высоких результатов.
Вывод
Итак, при реализации системы цифрового приёма и обработки радиосигналов и в процессе её работы в составе комплекса пассивной моноимпульсной радиолокационной станции подтверждены корректность и высокая эффективность разработанных технических решений и алгоритмов, а также целесообразность применения серийных цифровых модулей на этапе разработки макетов сложных радиотехнических систем для минимизации временны́х и финансовых затрат. ●
E-mail: dsp@inbox.ru
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!



