
Введение
Обеспечение экипажей морских судов информацией о наличии и типах объектов, которые находятся в зоне ответственности этих судов или представляют для них определённый интерес, является важной оперативной задачей и, как правило, осуществляется с помощью пассивных и активных оптических и радиотехнических средств. Предметом данной статьи являются вопросы реализации оптимизированных по критерию «эффективность–затраты» пассивных радиотехнических средств, а именно пеленгаторов-идентификаторов, которые обладают, помимо принципиальной скрытности применения, рядом других важных преимуществ по сравнению с активными радиолокационными средствами.
Во-первых, необходимая дальность действия пассивных пеленгаторов достигается существенно меньшими энергетическими и массогабаритными затратами, что очевидно следует из сравнения формул дальности радиолокации (1) и дальности пассивного пеленгования (2):
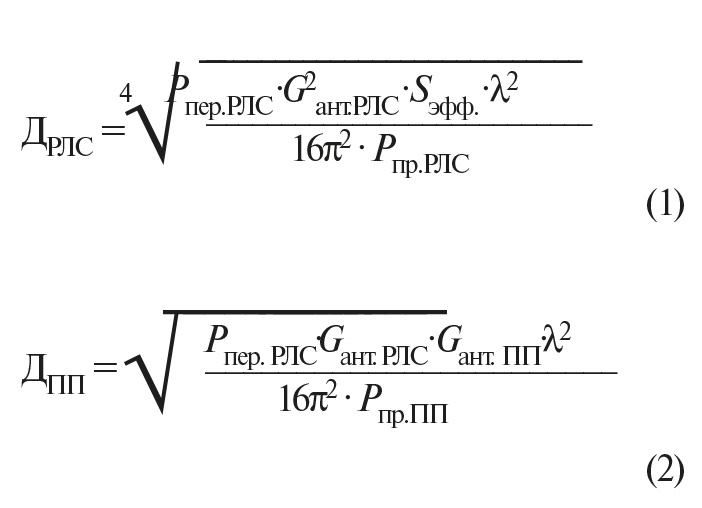
Здесь Рпер. РЛС – выходная мощность передатчика РЛС, Вт;
Gант. РЛС – коэффициент усиления антенны РЛС;
Рпр. РЛС – реальная чувствительность приёмника РЛС, Вт;
Sэфф. – эффективная площадь рассеяния (ЭПР) обнаруживаемого объекта, м2;
Gант. ПП – коэффициент усиления антенны пеленгатора;
Pпр. ПП — реальная чувствительность приёмника пассивного пеленгатора, Вт;
λ – длина волны при передаче/приёме, м.
Практически это означает, что пассивный пеленгатор (ПП), построенный на основе детекторных приёмников с чувствительностью 10–7 Вт и установленный на объекте с ЭПР до 3000 м2, будет обеспечивать более раннее (упреждённое) обнаружение объекта с излучающей стандартной навигационной РЛС, по сравнению с обнаружением этой РЛС носителя такого пеленгатора.
Во-вторых, частотные характеристики антенн и приёмников пассивного пеленгатора принципиально могут быть реализованы в весьма широком диапазоне (с перекрытием до 4), что обеспечивает возможность обнаружения и пеленгования РЛС, работающих на самых различных частотах и имеющих различное назначение.
В-третьих, применение специальных средств и алгоритмов обработки сигналов, обнаруживаемых пассивным пеленгатором, позволяет определять обширный перечень параметров излучающих РЛС, совокупность которых обеспечивает высокую вероятность определения типа не только радиолокационной станции, но и её носителя. К таким параметрам относятся, в первую очередь, несущая частота передатчика РЛС, длительность, период повторения и форма зондирующих импульсов, форма и ширина диаграммы направленности, период сканирования антенны РЛС и т.п.

Таким образом, морские суда или наземные посты, оснащённые пассивной аппаратурой автоматического пеленгования и идентификации РЛС с соответствующим отображением и обработкой накапливаемой информации, обладают важным функциональным преимуществом, которое радикально повышает эффективность несения службы по охране морских государственных границ, природных ресурсов, экономических зон и т.п. Кроме того, применение такой аппаратуры повышает безопасность судовождения, а также обеспечивает возможность предупреждения экипажа о непрерывном облучении судна сигналами специальных РЛС, что, как правило, свидетельствует об угрозе применения автоматически наводимого оружия.
Состав базового ряда радиоэлектронных устройств и узлов
Устройства и узлы для определения направления на излучающие РЛС
Большинство известных способов определения направления прихода принимаемых радиолокационных сигналов основаны на вычислении и преобразовании фазовых и/или амплитудных соотношений в приёмных каналах, подключенных к антеннам, которые имеют определённые диаграммы направленности и определённым образом ориентированы на объекте. Нами сделан выбор в пользу способа амплитудного пеленгования, традиционно используемого в судовой аппаратуре, как наиболее устойчивого к искажениям измерений в результате многократного и случайного приёма одного и того же сигнала, отражаемого от водной поверхности, элементов конструкции и оснащения судна и т.п.
Антенная система амплитудного пеленгатора состоит из нескольких антенн, диаграммы направленности (ДН) которых ориентированы в одной плоскости и частично перекрываются. Угол α между максимумами ДН каждой антенны зависит от количества антенн, которое выбирается с учётом обеспечения необходимой точности пеленгования. Для N-канального пеленгатора этот угол равен α=360°/N, при этом максимумы ДН ориентированы на углы α, 2α…Nα.
Если принимаемый сигнал находится в пределах ширины ДН, например, канала М, то в этом канале, естественно, будет измерен сигнал наибольшей амплитуды, а соотношения между амплитудами сигналов канала М и каналов М–1, М+1 могут быть использованы для более точного определения направления. Не углубляясь в математические выражения, следует отметить, что на точностные характеристики амплитудного пеленгатора в той или иной мере влияют неидентичность коэффициентов передачи в приёмных каналах, количество каналов (то есть ширина ДН каждой антенны), смещение максимума ДН относительно геометрической оси антенны. При прочих равных условиях наивысшая достижимая точность амплитудного пеленгования достигается в точках, в которых происходит переход от одного канала с максимальной амплитудой к другому, то есть в равносигнальных точках пересечения лепестков ДН соседних каналов (рис. 1).

Базовый состав антенн и приёмников для пеленгования
Состав антенн и приёмников выбран из соображений оптимального сочетания их номенклатуры и характеристик с возможностью быстрого, на заказ, создания различных конфигураций пеленгаторов, которые предоставляют заказчикам широкий выбор подходящих технических, массогабаритных и стоимостных характеристик.
Номенклатура разработанного ряда базовых антенных и приёмных устройств состоит из следующих изделий:
-
сверхширокополосных (с перекрытием от 2 до 4) антенн, предназначенных для реализации пеленгаторов, которые могут обеспечивать обнаружение, пеленгование, определение параметров и идентификацию практически всех существующих типов РЛС в диапазоне длин волн от десятков до единиц сантиметров;
-
относительно узкополосных (литерных) антенн, предназначенных для реализации недорогих пеленгаторов с ограниченным, но тактически приемлемым перечнем типов пеленгуемых и идентифицируемых РЛС (например, только навигационных РЛС или любых РЛС, излучающих в ограниченном диапазоне);
-
совместимых с антеннами по диапазонам входных частот приёмников с усилением и/или детектированием СВЧ-сигналов, обеспечивающих тактически приемлемую чувствительность и допустимую межканальную неидентичность для пеленгования с необходимой точностью и на достаточной дистанции;
-
видеоусилителей, обеспечивающих необходимую полосу пропускания и коэффициент усиления детектированных сигналов РЛС.
Перечисленные устройства и узлы показаны на рис. 2.

Базовый состав модулей аналого-цифрового преобразования и вычисления пеленга
Состав модулей АЦП и вычисления пеленга определён таким образом, чтобы их применение обеспечивало возможность создания пеленгаторов, имеющих различное число каналов (то есть различную точность пеленгования) и работающих с различными видами входных сигналов в приемлемом динамическом диапазоне. Следует отметить, что функциональные алгоритмы таких модулей обеспечивают наряду с вычислением направления прихода каждого принятого сигнала также и определение его длительности и амплитуды.
Номенклатура модулей АЦП и вычисления пеленга включает в себя:
-
узлы аналого-цифрового преобразования уровня видеосигналов на выходах приёмников в коды амплитуды, предназначенные для реализации пеленгаторов с приемлемыми значениями таких характеристик, как динамический диапазон и минимальная длительность пеленгуемых входных сигналов;
-
вычислительный модуль, предназначенный для построения пеленгаторов с различным числом приёмных каналов путём наращивания числа таких вычислительных модулей;
-
модуль объединения, синхронизации и кодирования данных от вычислительных модулей.
Модули АЦП и вычислителя пеленга показаны на рис. 3.

Устройства и узлы для определения несущей частоты пеленгуемых радиосигналов
Наличие в составе пеленгаторов-идентификаторов устройства для определения несущей частоты радиосигналов существенно повышает достоверность идентификации РЛС и их носителей не только по причине получения дополнительного идентификационного признака, но и в силу получаемой при этом возможности применения более утончённых алгоритмов сортировки и статистической обработки данных о параметрах пеленгуемых сигналов. Такие алгоритмы позволяют определять с высокой достоверностью целый ряд весьма специфических и эффективных идентификационных признаков.
Из всего многообразия известных методов и средств определения несущей частоты радиосигналов нами выбран метод беспоискового и мгновенного, то есть в течение обнаруженного импульса, измерения частоты излучения РЛС. Использование этого метода не только гарантирует практически 100-процентную вероятность обнаружения излучающих РЛС за время, не превышающее один период обзора антенны РЛС, но и наиболее полно расширяет возможности и достоверность идентификации.
Весьма серьёзным препятствием для широкого применения в пеленгаторах-идентификаторах мгновенных измерителей несущей частоты, обеспечивающих измерение частоты короткоимпульсных (70-100 нс) сигналов, являлись либо неприемлемые массогабаритные характеристики аппаратуры (при использовании «гребенки» узкополосных фильтров, перекрывающей широкий диапазон обнаружения), либо высокая технологическая сложность и, следовательно, стоимость тонкоплёночных широкополосных СВЧ-датчиков радиочастоты (фазовых мостов, полосно-пропускающих фильтров и т.п.). В результате целенаправленной работы нами создан ряд оригинальных, достаточно недорогих и простых в изготовлении и настройке частотно-зависимых СВЧ-узлов (частотных дискриминаторов). Эти узлы являются основой унифицированного ряда компактных, функционально и конструктивно завершённых модулей приёмников – мгновенных измерителей несущей частоты импульсных и непрерывных радиосигналов.

На рис. 4 показан один из конструктивно одинаковых модулей, полный ряд которых обеспечивает возможность мгновенного измерения частоты радиосигналов в диапазоне от 0,4 до 18,0 ГГц со среднеквадратическим отклонением от истинных значений не более 10 МГц в низкочастотной части указанного диапазона и не более 60 МГц в его высокочастотной части. По совокупности точностных, массогабаритных и стоимостных характеристик эти модули не имеют отечественных аналогов.
Устройства и узлы для статистической обработки, идентификации и отображения
Успешное решение задачи разделения (сортировки) хаотического потока входных сигналов на группы (пачки), каждая из которых наиболее вероятно относится к излучениям отдельной РЛС, является одним из важнейших условий для эффективного использования пеленгаторов-идентификаторов по назначению.
Проблема достижения высокой достоверности результатов сортировки обусловлена не только необходимостью обеспечения высокой точности и незначительной дисперсии результатов определения основных параметров каждого принимаемого сигнала (пеленга, несущей частоты, длительности и амплитуды), но и необходимостью корректного учёта ряда факторов, в основе которых лежат особенности распространения и приёма радиолокационных сигналов в реальных условиях. Многолетний опыт разработок и практики применения пеленгаторов-идентификаторов показывает, что без глубокого анализа и учёта совокупности таких реальных процессов, как множество хаотических путей прихода одного и того же сигнала в точку приёма, случайный пропуск в приёме сигналов и искажения измерений при одновременном приходе в точку приёма сигналов от разных РЛС, изменения интенсивности и характера приёма сигналов при удалении или приближении РЛС и т.д., практически невозможно достигнуть стабильных и достоверных результатов определения характеристик и идентификации РЛС.
С учётом изложенных факторов, а также благодаря возможностям современной аппаратной и вычислительной базы (ПЛИС, микроконтроллеров, мощных и компактных компьютеров и т.п.) в нашей аппаратуре реализован эффективный многоуровневый процесс обработки данных о параметрах пеленгуемых РЛС. При этом первый уровень обработки начинается с алгоритмов вычислений и принятия определённых решений в реальном масштабе времени ещё на этапе измерения параметров каждого принимаемого сигнала в отдельности, а последний уровень реализуется на базе бортового компьютера специальным программным обеспечением в квазиреальном масштабе времени.

Промежуточные уровни вычислений, сортировки и принятия решений осуществляются в реальном масштабе времени по специальным алгоритмам, реализованным в аппаратно-программных модулях (спецвычислителях), показанных на рис. 5 и составляющих часть базового ряда устройств для статистической обработки и идентификации. Остальную часть базовых средств обработки, идентификации и отображения составляют одноплатный компьютер МIС-2352 (фирма Advantech) и ряд интерфейсных плат (RS-422/485, Ethernet, «Манчестер»), которые устанавливаются на 11-слотовой платформе МIC-2000 фирмы Advantech (рис. 6) вместе с двумя спецвычислителями и модулем флэш-памяти.

Необходимо отметить высокую надёжность выбранного нами вычислительного оборудования, которое четвёртый год безотказно работает в жёстких условиях эксплуатации судового оборудования не только в северных, но и в тропических широтах.

Представленная на рис. 7 базовая структура пеленгатора-идентификатора обеспечивает возможности гибкого комплексирования разнообразных конфигураций, адаптируемых к требованиям заказчика по тактико-техническим и стоимостным характеристикам, возможностям размещения на объекте, условиям эксплуатации и т.п. Используемая конструктивная база узлов и модулей, в большинстве своём основанная на применении кассет и ячеек стандарта Евромеханика фирмы Bopla, позволяет предельно сокращать сроки и стоимость конструктивной адаптации к условиям размещения на конкретном объекте. При этом, как правило, оригинальными конструкциями являются блоки с антенно-приёмными устройствами, форма и размеры которых в наибольшей степени зависят от требований к точности пеленгования, дальности действия и вероятности мгновенного обнаружения и идентификации РЛС.
Заключение
Успешно проведённые заводские и государственные испытания, а также опыт эксплуатации аппаратуры в максимальной конфигурации подтвердили правильность выбора номенклатуры, схемотехники, характеристик и конструктивных решений базового ряда функциональных радиоэлектронных устройств и узлов. Многообразие их возможных применений, высокая надёжность, низкое энергопотребление и устойчивость к жёстким условиям эксплуатации предоставляют широкие возможности для создания автоматических систем информационного обеспечения в интересах различных служб и организаций. Энергичное развитие микроэлектроники и новых программных и аппаратных средств позволяет в рамках промышленных САПР, в частности, на основе распределённых Web-ориентированных структур, активно расширять перечень и функциональные возможности базового ряда модулей нового поколения.
Авторы выражают благодарность сотрудникам НПП «Квинт» (г. Таганрог), поставившего оборудование фирмы Advantech, за техническую поддержку при выполнении проекта. ●
Авторы — сотрудники Таганрогского государственного радиотехнического университета и НКБ «Миус» ТРТУ
Телефоны: (8634) 31-0629, 66-9211
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!



