
Высокопроизводительный компьютер JHCTECH BRAV-7135 — это мощная периферийная вычислительная платформа, способная удовлетворить строгие требования, предъявляемые к интеллектуальным аграрным роботам. Благодаря развитым вычислительным возможностям, широкому набору интерфейсов и надежности промышленного уровня BRAV-7135 представляет собой комплексное решение для интеллектуальных систем сбора урожая – начиная от анализа окружающей среды и принятия решений заканчивая точным управлением.
Для «умного» сельского хозяйства: нужны не просто роботы, но и «умный» «мозг»
Текущие проблемы в мировом сельском хозяйстве:
✔ Сбор урожая требует ручного труда: высокая стоимость, низкая эффективность и сложность нормирования
✔ Сложные местные условия: переменное освещение, препятствия в виде листвы и неровностей рельефа
✔ Работа в режиме реального времени: обнаружение, позиционирование и сбор урожая должны осуществляться за доли секунды
Традиционные облачные решения часто грешат высокой задержкой и сильной зависимостью от качества сети. В отличие от них, периферийные вычисления лишены этих недостатков и быстро становятся ключевой технологией для создания интеллектуальной сельскохозяйственной робототехники.
BRAV-7135: специально разработан для «умного» сельского хозяйства
Интеллектуальный робот сборщик, управляемый BRAV-7135, снижает трудозатраты и повышает эффективность сбора плодов, анализируя рост растений и прогнозируя урожайность сводя к минимуму количество отходов. Комплекс построен на аппаратно-программной архитектуре, использует картографирование SLAM (англ. simultaneous localization and mapping — одновременная локализация и построение карты) на основе лидара, поддерживаемую ситемой RTK-GPS глобального позиционирования. Визуальная повторная локализация также применяется для исправления накопленных ошибок. На этапе распознавания цели широкоугольная камера выполняет начальное сканирование для определения плодоносящих участков, в то время как мультиспектральный анализ оценивает степень спелости, гарантируя требуемое качество плодов. На этапе сбора урожая программные алгоритмы также рассчитывают оптимальную траекторию уборки, а адаптируемый манипулятор динамически регулирует силу захвата. Инерциальные измерения используются для обеспечения стабильности работы на протяжении всего процесса сбора урожая. После сбора система автоматически сортирует, фасует фрукты в зависимости от степени зрелости, одновременно собирая статистику урожайности и проводя предварительную проверку качества. Система поддерживает автономную зарядку и отправку отчетов о сбоях и отклонениях.
Технические характеристики:
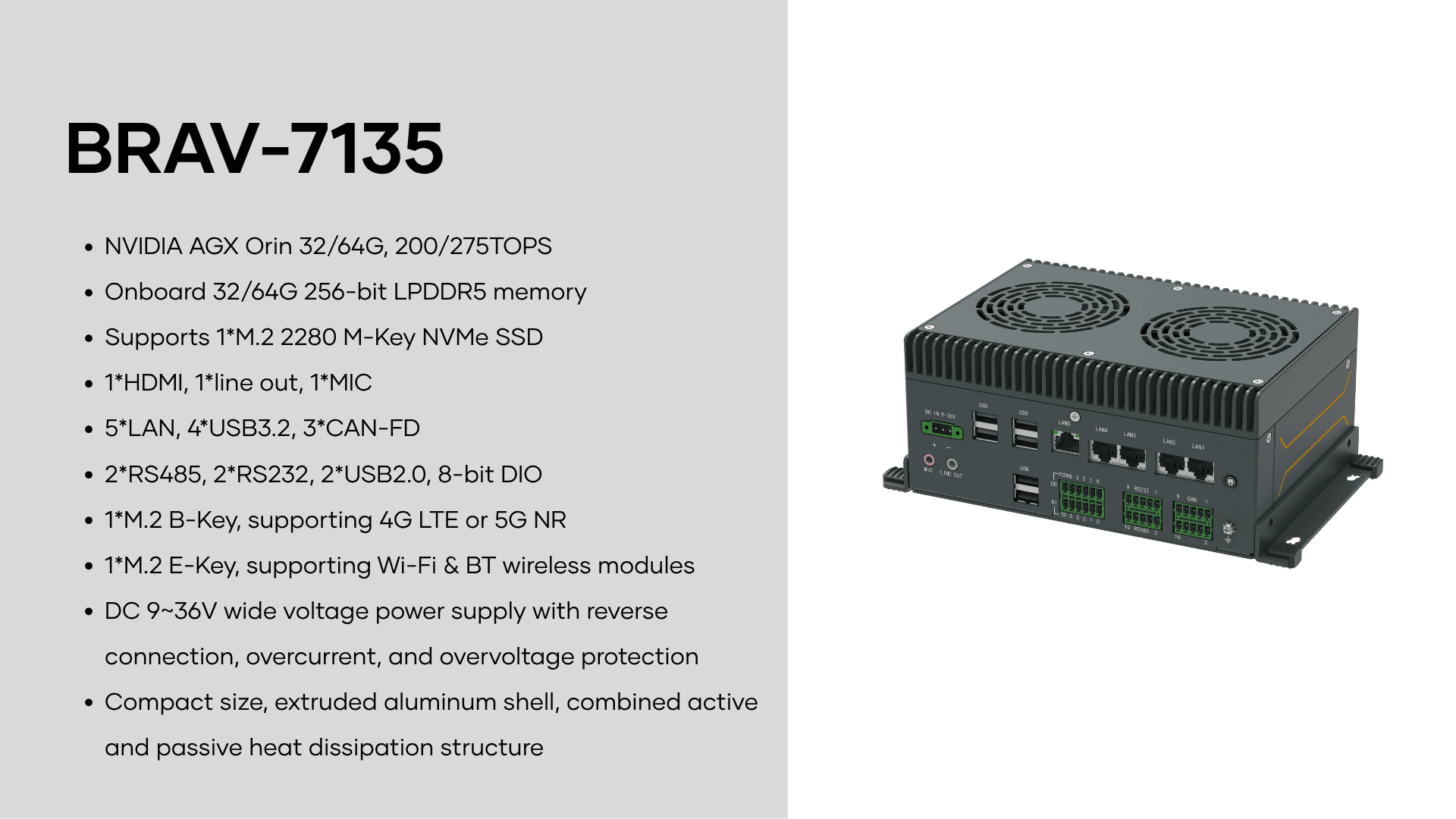
Микроконтроллер NVIDIA Jetson AGX Orin 32/64 ГБ, 200/275 TOPS
Встроенная память 32/64 ГБ, 256 бит, LPDDR5
Поддержка 1*M.2 2280 M-Key NVMe SSD
1*HDMI, 1*линейный выход, 1*MIC
5*LAN, 4*USB3.2, 3*CAN-FD
2*RS485, 2*RS232, 2*USB2.0, 8-битный DIO
1*M.2 B-Key с поддержкой 4G LTE или 5G NR
1*M.2 E-Key с поддержкой беспроводной связи по Wi-Fi и Bluetooth
Широкий диапазон входного напряжения 9–36 В, защита от перенапряжения, перегрузки по току и короткого замыкания
Компактный корпус из алюминиевого профиля, комбинированная активная и пассивная система теплоотвода
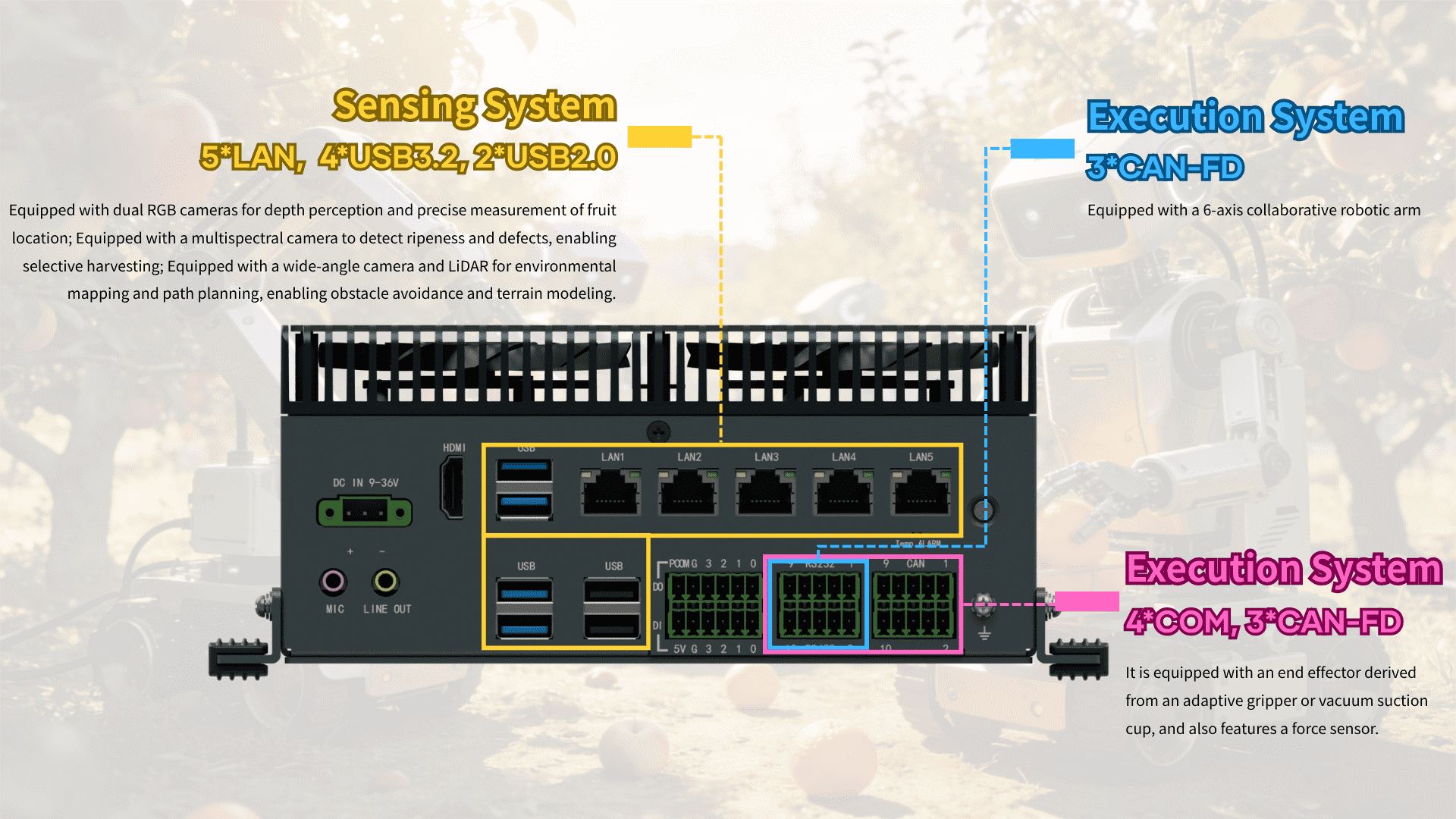
Система визуального контроля использует две RGB-камеры с подключением через USB или Ethernet для измерения расстояний и точного определения местоположения плодов, а мультиспектральная камера оценивает степень зрелости и наличие дефектов для выборочного сбора урожая; помимо этого, широкоугольная камера и лидар служат для составления карты местности и планирования маршрута, что позволяет объезжать препятствия и моделировать рельеф.
Исполнительная система по CAN интерфейсу управляет 6-осевым коллаборативным роботом-манипулятором и адаптивными захватами с датчиками усилий или вакуумными присосками, управляемыми по RS-485 и CAN. Вспомогательные системы включают в себя кнопку аварийной остановки и датчики предотвращения столкновений.
Программное обеспечение:
В распоряжении пользователей имеются различные библиотеки алгоритмов, в том числе стеки ИИ машинного зрения и логического вывода. Интеграция ROS2 в систему управления роботом обеспечивает эффективную и независимую совместную работу модулей осязания, планирования и управления. Она также поддерживает управление различными моделями роботов, преобразованиями координат (TF) и точечными данными из облака. Что касается восприятия, то для создания многопоточных конвейеров обработки видео с помощью ИИ используется интегрированный SDK, позволяющий эффективно обрабатывать визуальные данные с нескольких камер.
Помимо интеллектуальных алгоритмов планирования траектории, обеспечивающих согласованное движение роботизированной руки и мобильного шасси, система оснащена алгоритмами динамического распознавания целей, которые адаптируются к изменениям условий освещения и затененности листвой. Она также включает в себя адаптивные алгоритмы захвата, которые регулируют силу в зависимости от формы и твердости плода
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





