
Точность и продолжительность измерений при коррелированной погрешности
При использовании описанной в первой части статьи процедуры усреднения результатов измерений никак не учитывалось, за какое время выполняется серия измерений, поскольку предполагалось, что погрешность является некоррелированным (белым) шумом. Далее будут рассмотрены эффекты, которые возникают в реальных условиях, когда шум измерений является цветным. Попутно станет ясно, почему точные измерительные приборы работают медленно.
Измерительные каналы средств автоматизации обычно являются частью систем, компоненты которых распределены в пространстве и соединены между собой кабельными линиями. Поэтому на них воздействует весь спектр помех, имеющихся в конкретной электромагнитной обстановке. Основными компонентами случайной погрешности, вызванной помехами, являются белый шум, фликкер-шум (1/f-шум) и относительно узкополосные помехи от работающего электрооборудования, передатчиков и естественных источников электромагнитного излучения.
Пример одной реализации белого шума (некоррелированной погрешности измерений) показан на рис. 3 б (см. первую часть статьи в «СТА» 4/2009). Характерной его особенностью является то, что при изменении масштаба по оси времени внешний вид графика остаётся прежним, уменьшается только среднеквадратическое значение шума вследствие уменьшения ширины временного окна наблюдения.
В отличие от него, график реализации коррелированного шума изменяет свой внешний вид в зависимости от ширины окна наблюдения (см. рис. 3 а в первой части статьи). Коррелированный шум с заданной автокорреляционной функцией можно получить из белого, пропустив его через фильтр с заранее рассчитанной передаточной характеристикой.
Многократные измерения с усреднением всегда выполняются на конечном интервале времени Δt. Если случайная погрешность не коррелирована, то её математическое ожидание равно нулю и не зависит от величины интервала (Δt1, Δt2 на рис. 3 б) и момента начала измерения. Поэтому усреднение по формуле (3) может дать неограниченное уменьшение случайной составляющей погрешности измерений с ростом числа измерений.
Если же этот интервал усреднения Δt меньше времени корреляции (см. рис. 3 а), то на каждом отдельно взятом интервале усреднения Δt1 или Δt2 получим разные значения погрешности. В отличие от белого шума погрешность среднего арифметического при увеличении количества измерений будет стремиться к некоторому значению (xср1, xср2 на рис. 3 а), отличному от нуля. Поэтому формула (3) перестаёт быть справедливой.
Поскольку в реальных измерениях всегда присутствует, по крайней мере, фликкер-шум (это является фундаментальным законом природы), который делает шум измерений отличным от белого, то усреднение измерений не может снизить случайную составляющую погрешности до нуля. Кроме того, в цифровых средствах измерений всегда присутствует помеха с частотой тактового генератора, которая придаёт окраску белому шуму.
Предположим, что измерения выполняются в течение конечного промежутка времени T (то есть во временно́м окне шириной T) и за это время выполняется N измерений с равными интервалами τ = T/N между ними, после чего находится среднее значение xср (1). Предположим для простоты, что измеряемая величина равна нулю, то есть в результате измерений мы получаем только величину случайной погрешности, которую обозначим x(t).
Найдём среднеквадратическое отклонение погрешности xср. Для этого проведем множество измерений сериями по N, выполняя усреднение в пределах каждой серии. В результате получим множество значений xср.

Измерения будем выполнять в моменты времени 0, τ, 2τ, ... (рис. 4 а). Обратим внимание, что измерение в моменты времени 0, τ, 2τ, ... эквивалентно измерению в один и тот же момент времени t (рис. 4 б), если использовать линии задержки, которые будут сдвигать реализацию случайного процесса на 0, τ, 2τ, ... . Поэтому результат усреднения измерений, выполненных за время T = (N–1)τ, можно записать в виде:

где t — момент времени выполнения измерений.
Функцию xср(t) можно описать с помощью спектральной плотности мощности, для чего сначала найдём её Фурье-изображение:
где сначала использована замена переменной t = ξ + kτ, затем введено обозначение
Фурье-изображения рассматриваемой случайной погрешности x(t).
Полученное выражение можно записать в виде:

где

Таким образом, процесс усреднения можно рассматривать как прохождение случайного процесса через усредняющий фильтр с передаточной характеристикой (9). Поскольку вследствие симметрии Фурье-изображений в (8) относительно оси ординат Xср(–jω) = W(–jω)X(–jω), то, умножая левую и правую часть этого выражения на соответствующие части из выражения (8), получим:
Xcp(jω)Xcp(−jω) =W(jω)W(−jω)X(jω)X(−jω),
откуда
|Xcp(jω)|2 = |W(jω)|2|X(jω)|2.
Пользуясь определением спектральной плотности мощности, из последнего выражения получим:
Scp(ω) = |W(jω)|2S(ω),
где S(ω) и Sср(ω) — спектральные плотности мощности случайной составляющей погрешности до процесса усреднения и после.
Рассмотрим передаточную функцию усредняющего фильтра (9). Используя формулу суммы членов геометрической прогрессии
её можно записать в виде:

Пользуясь соотношением [exp(jx) – exp(–jx)]/2j = sin(x), окончательно получим:
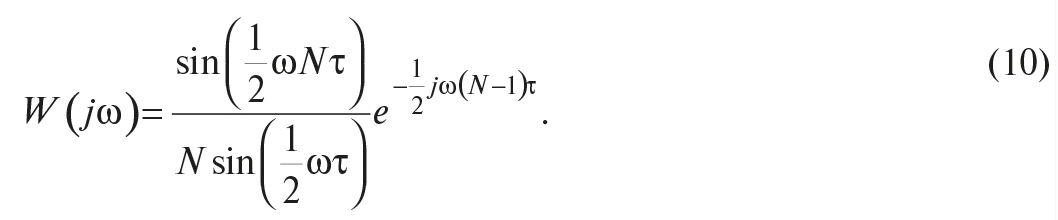
Выражение (10) является передаточной функцией цифрового sinc-фильтра [3] (список литературы в первой части статьи), то есть усреднение измерений, полученных в N точках, отстоящих друг от друга на τ, эквивалентно цифровой фильтрации в прямоугольном окне шириной Nτ. В результате фильтрации ослабляются спектральные составляющие погрешности измерений, расположенные выше граничной частоты фильтра.
Дисперсию погрешности измерений можно найти, интегрируя спектральную плотность мощности погрешности по всей полосе частот, от 0 до ∞:
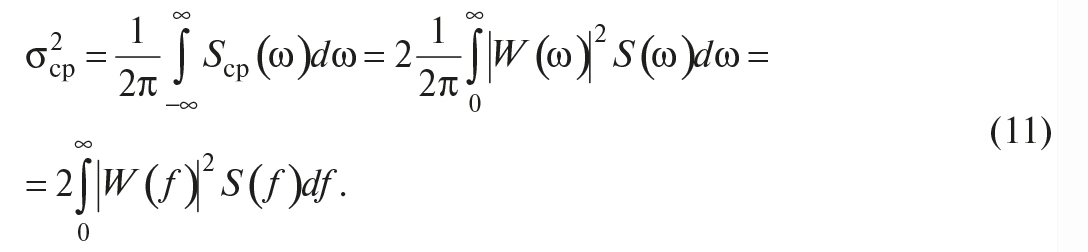
Это выражение справедливо для погрешности с любой спектральной плотностью. Предположим сначала, что погрешность является белым шумом, то есть S(ω)=S0=const. Тогда, подставляя (10) в (11), получим

где fд = 1/τ — частота дискретизации (то есть измерений), откуда
σср=σх/√N
Это выражение совпадает с ранее полученным выражением (3), поскольку использовано предположение о преобладании белого шума. Таким образом, усреднение N однократных измерений, выполненных в N временных точках, отстоящих друг от друга на τ, при белом шуме уменьшает погрешность в √N раз.
В случае коррелированных измерений (цветного шума) необходимо использовать формулу (7). В неё входят коэффициенты корреляции rij, которые можно найти следующим образом. Предположим, что случайная составляющая погрешности измерений обусловлена смесью белого шума со спектральной плотностью S0 и фликкер-шума со спектральной плотностью , где c — константа, определяемая экспериментально (рис. 5).
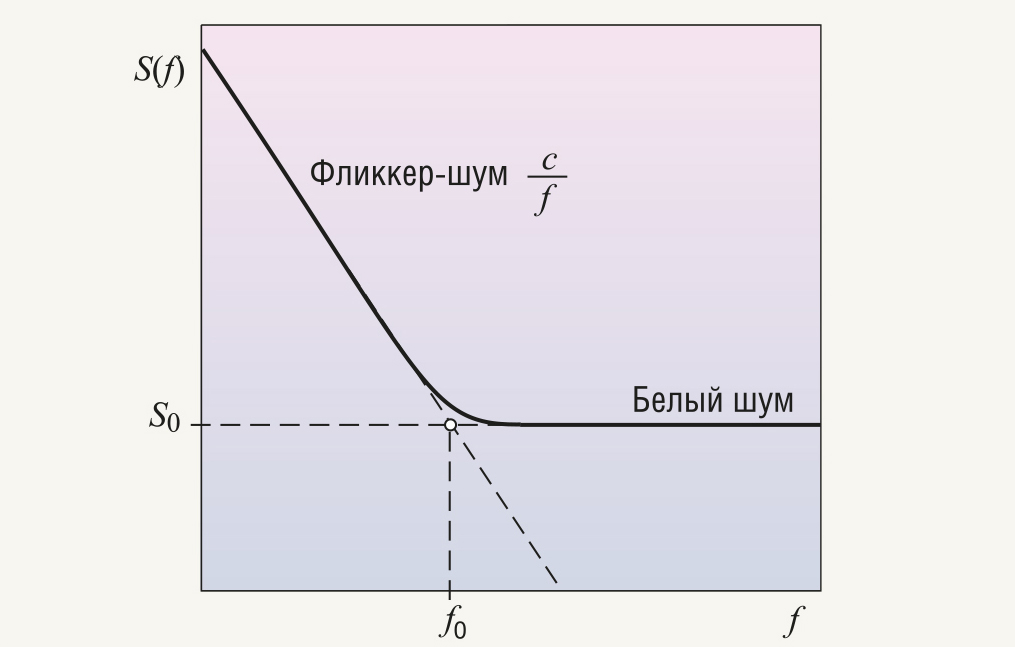
Тогда спектральную плотность мощности погрешности можно выразить как

Найдём частоту f0, на которой оба компонента шума одинаковы (рис. 5): S0=c/f0, откуда f0=c/S0.
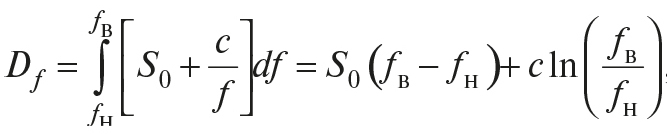
При f → 0 спектральная плотность мощности (12) стремится к бесконечности, поэтому интеграл (11) для фликкер-шума расходится. Однако если учесть, что измерительные каналы систем автоматизации имеют режим автокалибровки, то низкочастотные компоненты фликкер-шума будут подавлены. Это позволяет выбрать ненулевую нижнюю границу спектра фликкер-шума, равную fн. Если калибровка в процессе эксплуатации прибора не выполняется, то величина fн будет определяться межповерочным интервалом средства измерений.
Для получения корреляционной матрицы сначала найдём функцию автокорреляции случайной погрешности Rx(τ), используя теорему Винера-Хинчина и преобразование Фурье:

где τ — интервал времени между отдельными измерениями (сечениями случайного процесса). Здесь и далее мы используем односторонний энергетический спектр. Пределы интегрирования выбраны в предположении, что в реальных средствах измерений полоса частот погрешностей сверху ограничена верхней граничной частотой полосы пропускания измерительного канала fв, а снизу — межкалибровочным интервалом Tмк. Поэтому в спектре помехи не могут существовать компоненты с частотой ниже fн = 1/Tмк. Интегрируя (13) и используя дисперсию
нормированную на Df автокорреляционную функцию можно записать в виде:
где Ci(·) — интегральный косинус,
γ = 0,5772… — постоянная Эйлера.
Графики функции r(τ) при типичной для измерительных модулей систем промышленной автоматизации граничной частоте fв = 10 Гц [3], разных fн = 1/Tмк (то есть разных интервалах между калибровками Tмк) и при пересечении графиков с/f и S0 в точке S0 = 1 Гц показаны на рис. 6.
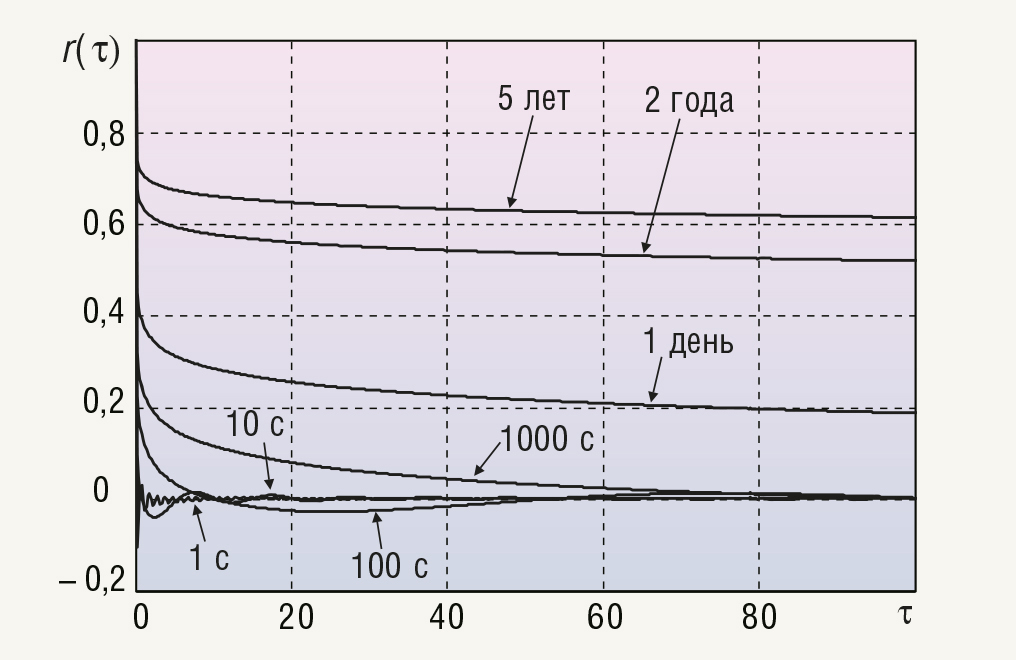
Как следует из рисунка, наиболее сильная корреляция между отдельными измерениями существует при измерениях с интервалом менее 10 с. При интервале между калибровками более 1 мин корреляция шумовой погрешности является относительно слабой; это характерно для приборов с автоматической калибровкой, которые калибруются, например, в момент включения или перед каждым измерением. Сильная корреляция погрешности (более 0,7) свойственна приборам, которые калибруются только во время периодической поверки (например, с интервалом 2 года и более).
Качественное объяснение приведённых графиков состоит в следующем. С увеличением интервала между калибровками растет доля спектральной плотности мощности погрешности, приходящаяся на низкочастотную часть энергетического спектра. Поэтому увеличивается вероятность того, что все измерения, сделанные за время, которое много меньше периода между калибровками, будут одинаково смещены в одну сторону.
Предположим, что усреднение по множеству значений случайной величины (погрешности измерений) в сечении случайного процесса можно заменить усреднением по времени (то есть случайный процесс является эргодическим). Тогда в качестве коэффициентов корреляции можно использовать значения автокорреляционной функции (14) в моменты измерений ti, tj, то есть rij = rf(τij), τij = ti – tj. Поскольку автокорреляционная функция зависит только от интервала между моментами измерений, то при одинаковых интервалах двойную сумму в (7) можно записать в виде:

где k — порядковый номер измерения; T — интервал времени между соседними измерениями. Поэтому выражение (7) можно записать в виде:

Для практических оценок эту формулу можно ещё более упростить. Как следует из рис. 6, при больших значениях автокорреляционной функции и малом количестве отсчётов можно принять r(τ) = r0 » const. Например, при интервале между измерениями 20 с и количестве измерений 10 коэффициент корреляции для верхней кривой на рис. 6 изменяется менее чем на 5%. Для этих случаев выражение (15) упрощается:

На рис. 7 показан график, построенный в соответствии с формулой (16).

Погрешность при наличии узкополосных помех
Рассмотрим теперь влияние на погрешность измерений узкополосных помех из сети с частотой 50 Гц и от цифровой части средства измерений. Предположим, что среднеквадратическое отклонение помехи определяется её основной гармоникой:
e(t) = A cos(2πfst), (17)
где fs = 1/Ts, Ts — период колебания, A — амплитуда. Поскольку измерения выполняются в дискретные моменты времени с постоянным интервалом T, то величина погрешности измерений будет зависеть от соотношения Ts, T и количества измерений.
Рассмотрим сначала погрешность, вызванную помехой с частотой 50 Гц. Многократные измерения с периодом T эквивалентны дискретизации помехи в моменты измерений. Если период измерений стабилен, то помеха переносится в низкочастотную область благодаря алиасному (стробоскопическому) эффекту. Представим моменты измерений в виде:
tk = (MTs + δTs)k, (18)
где M = 1, 2, … — целое число, 0 < δ < 1 — доля периода, k ∈ [0,2,... N] — порядковый номер измерения. Тогда уравнение помехи (17) после дискретизации можно записать в виде:
e(t) = A cos(2πfs(MTs + δTs)k) = A cos(2πfsδTsk).
Здесь использована известная формула тригонометрии для косинуса суммы углов и соотношение cos(2πfsMT) = 1.
Количество измерений KT, приходящихся на период алиасной помехи, можно найти из соотношения 2πfsσTsKT = 2π, откуда KT = 1/σ. Интервал времени между измерениями, как следует из (18), равен T = MTs + σTs , поэтому период алиасных колебаний будет:

Таким образом, в результате измерений значений помехи со стабильным интервалом Ts её период увеличивается после дискретизации в (M + σ)/σ раз; во столько же раз падает частота.
Процесс усреднения результатов многократных измерений, выполненных с интервалом T, эквивалентен прохождению сигнала через дискретный sinc-фильтр [3]. Поэтому эффективность ослабления помехи будет зависеть от соотношения ширины окна усреднения (то есть полосы пропускания фильтра), частоты алиасной помехи fа = 1/Tа и частоты fа – 1/T, полученной вследствие размножения копий спектра алиасной помехи при её дискретизации.
Однако, как следует из (19), при σ → 0 (то есть когда на интервале измерений укладывается целое число периодов помехи) fа → 0 и частота помехи становится ниже граничной частоты усредняющего фильтра, а в пределе получаем постоянное смещение на уровень, величина которого зависит от случайной фазы помехи в момент измерений. Поэтому в общем случае ослабить помеху из сети 50 Гц с помощью усреднения невозможно. Теоретически такое ослабление было бы возможно только при искусственной синхронизации процесса измерений с сигналом помехи или при измерениях в некоррелированные случайные моменты времени.
Рассмотрим теперь случай, когда погрешность измерений вызвана высокочастотной помехой от цифровой части измерительной системы. Для неё Ts имеет порядок долей микросекунды. Разброс (нестабильность) меток времени в компьютере составляет десятые и сотые доли секунды, в ПЛК с операционной системой реального времени — десятки микросекунд [3]. Поэтому измерения помехи с частотой более 1 МГц (период менее 1 мкс) не могут быть периодическими. Величина помехи в момент измерения является случайной величиной и определяется законом распределения нестабильности тактирования pT(T) в компьютере или контроллере. К сожалению, корреляционная функция периода измерений с помощью компьютера или контроллера является неисследованной. Если предположить, что период измерений описывается моделью белого шума, то результат дискретизации помехи также будет белым шумом, который учитывается в погрешности измерений формулой (15).
Выводы
Из изложенного в данной статье можно сделать следующие выводы.
-
Увеличение точности путём усреднения результатов многократных измерений ограничено не только систематической составляющей погрешности, но и спектральным составом шума измерений. Фликкер-шум, спектральная плотность мощности которого растёт с понижением частоты, ограничивает возможность увеличения точности путём усреднения.
-
Наиболее практичным способом устранения погрешности, обусловленной фликкер-шумом, является периодическая автокалибровка средства измерений.
-
Погрешность усреднения в случае некоррелированной погрешности не зависит от ширины временного окна Nτ, а зависит только от количества отсчётов N.
-
Усреднение может применяться только при постоянном значении измеряемой величины. В противном случае нужно учитывать динамическую погрешность или уменьшать ширину окна усреднения.
-
Усреднение является разновидностью цифровой фильтрации методом «скользящего среднего», поэтому может быть использовано и при наличии шумов объекта измерений. Однако этой проблеме посвящена специальная литература.
-
Информация, необходимая для оценки функции автокорреляции, обычно отсутствует. Для её получения необходимо измерять спектральную плотность погрешности автоматизированными методами измерений [3], что является довольно трудоёмкой задачей. Поэтому предложенная методика оценки погрешности при коррелированном шуме может найти применение в редких случаях, когда целью является получение максимального количества информации, несмотря на трудозатраты на её получение. ●
Если вам понравился материал, кликните значок - вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал - не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





