
Введение
Использование импульсных сигналов для передачи информации, предложенное ещё на заре развития радиоэлектроники, имеет бесспорные преимущества. Они позволяют чётко формализовать передаваемую информацию и обеспечивают высокую помехоустойчивость. Привычные для радиоинженеров цифровые сигналы, формируемые на основе двоичной системы счисления, являются частным случаем импульсных сигналов. Использование цифровых сигналов, а также развитые современные способы проектирования вполне себя оправдывают [1], позволяя создавать сложные законченные устройства с широкой функциональностью.
Вместе с тем цифровым устройствам свойственна широкополосная помехоэмиссия, полоса которой определяется битовой скоростью передаваемых сигналов и характеризуется непрерывным спектром, если битовый поток имеет случайный характер. Во многих случаях помехоэмиссия, формируемая цифровыми устройствами (ЦУ), определяет электромагнитную обстановку в части широкополосных помех в месте их эксплуатации [2]. Для некоторых сигналов, например тактовых, имеющих выраженную периодичность, в спектре излучений будут присутствовать явно выраженные гармоники, которые легко обнаружить, используя пробники ближнего поля и анализаторы спектра либо осциллографы с функцией быстрого преобразования Фурье.
Ограничение помехоэмиссии технических средств (ТС) является обязательным в составе мероприятий, направленных на обеспечение электромагнитной совместимости (ЭМС). Среди всех прочих методов ограничения – экранирования, выбора рациональной структуры и топологии печатных узлов и других – модификация используемых сигналов является самым молодым направлением и потому требует отдельного рассмотрения.
Известно, что цифровые сигналы характеризуются джиттером [1], т.е. «дрожанием» фронтов и спадов за счёт непостоянства битового интервала. Причины джиттера довольно подробно рассмотрены в [3], обычно к ним относят вариации напряжения электропитания, разницу накопленного заряда в линиях передачи, бит процессы, предшествовавшие текущей передаче и т.д. В ЦУ джиттер является вредным явлением и потому его стремятся уменьшить различными способами, например, используя тактовые генераторы с улучшенными показателями стабильности либо повышая напряжение электропитания с переходом на соответствующую компонентную базу.
Вместе с тем наличие джиттера может быть использовано для снижения уровня помехоэмиссии за счёт перераспределения энергии помех по частоте, если джиттер будет иметь управляемый характер. Это положение требует качественного и количественного обоснования, а также экспериментальной проверки.
Предпосылки использования управляемого джиттера для снижения помехоэмиссии
В ЦУ в общем случае используются сигналы в форме произвольных битовых последовательностей. Такие сигналы имеют сплошной спектр, т.к. являются непериодическими. Построение теории управляемого джиттера (УД) целесообразно сначала выполнять для периодических сигналов, а затем обобщить на произвольные цифровые последовательности.
Пусть последовательность нулей и единиц имеет номинальную частоту f0 и изначально характеризуется отсутствием джиттера любой природы. ЦУ может работать в некотором интервале значений f0, возможные границы которого определяются потребностью в том или ином соотнесении работы ЦУ с физическим временем, а верхняя граница, кроме того, зависит от применяемой элементной базы. Любое привнесение в передачу периодического сигнала оказывает влияние на работу ЦУ, потому оно должно быть по возможности минимальным, не влияющим на выходные параметры устройства и незаметным для пользователя. Следовательно, введение УД не должно существенно изменять значение f0, и после него значение частоты будет лежать в некотором симметричном относительно f0 интервале [f0 – k×f0; f0 + k×f0], где k << 1. В реальных ЦУ всегда заложен запас на джиттер, который может быть использован и для рассматриваемого варьирования частоты.
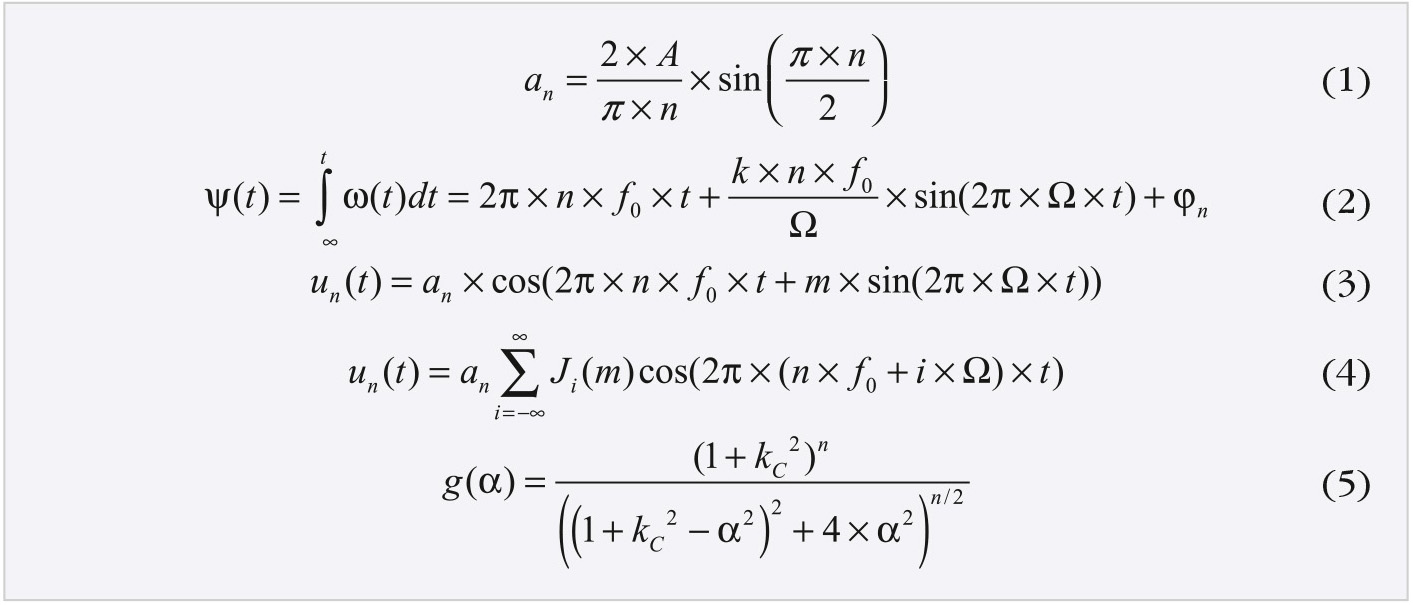
Известно, что при неизменной частоте последовательность импульсов с амплитудой A и длительностью τи = T0/2, где T0 = 1/f0, может быть разложена в периодический ряд Фурье. Если такая последовательность является чётной функцией, то коэффициенты разложения будут описываться формулой (1) при постоянной составляющей a = A/2. Спектр будет иметь линейчатый характер с гармониками на частотах n × f0.
Будем считать, что частота f является функцией времени, причём f(t) = f0 + k×f0×G(t). Для функции G(t) следует потребовать выполнения условия |G(t)| ≤ 1, и, кроме того, она дополнительно должна иметь следующие свойства:
- быть однозначно определенной для любого момента времени, являться интегрируемой и дифференцируемой;
- не иметь разрывов, поскольку скачкообразное изменение битовых интервалов в ЦУ приводит к сбоям в работе систем синхронизации и автоматического восстановления тактовой частоты;
- быть периодической, иначе управление джиттером завершится после достижения крайней границы интервала «качания» частоты;
- иметь практически постоянную частоту Ω в пределах периода сигнала, т.е. должно выполняться неравенство Ω << f0.
Для того чтобы работа ЦУ правильно соотносилась с реальным временем, нужно дополнительно соблюдать равенство:

где t’ – произвольный момент времени работы ЦУ, τ = 1/Ω – период функции G(t).
Будем считать, что G(t) = cos(2π×Ω×t) (обоснование такого выбора будет пояснено позже). Медленное изменение частоты f(t) = f0 + k×f0×cos(2π×Ω×t) приведёт к тому, что каждая гармоническая составляющая спектра на частоте n×f0 окажется модулированной по частоте. Для гармоники с номером n интервал изменения частоты составит [n×f0(1 – k); n×f0(1 + k)]. Таким образом, каждая из них оказывается эквивалентна сигналу с однотональной частотной модуляцией [4]. Энергия каждой модулированной гармоники сконцентрирована вблизи частоты n×f0. Амплитуда каждой немодулированной несущей рассчитывается по формуле (1).
Циклическая частота для гармоники с номером n составит ω(t) = 2π×n(f0 + k×f0×cos(2π×Ω×t)), откуда зависимость фазы от времени имеет вид (см. формулу 2), где jn – некоторый начальный фазовый угол, который для дальнейшего анализа равен нулю. Значение m = n×k×f0/Ω в теории радиосигналов принято называть индексом однотональной угловой модуляции. Таким образом, при наличии медленного «качания» частоты гармоническая составляющая с номером n трансформируется в сигнал вида (см. формулу 3).
Известно, что сигнал, задаваемый уравнением (3), представляется в виде разложения на гармоники в окрестности частоты n×f0 на основе разложения в следующий ряд [4] (см. формулу 4), где Ji(m) – функция Бесселя первого рода i-го порядка.
Уравнение (4) определяет гармонический состав спектра последовательности импульсов с УД. Уравнение имеет важное следствие: при медленном моногармоническом изменении частоты следования прямоугольных импульсов каждая спектральная составляющая будет претерпевать расщепление на бесконечное количество спектральных линий с частотами n×f0 + i×Ω. Таким образом, энергия гармоник на частотах n×f0 оказывается распределённой в некоторой полосе частот, и за счёт этого будет наблюдаться снижение уровня помехоэмиссии, регистрируемого при измерениях. Однако для этого должны быть выполнены некоторые другие условия, вытекающие из установленного стандартами порядка их проведения.
Особенности измерений помехоэмиссии с использованием измерительных приёмников и анализаторов спектра
Порядок измерений эмиссии излучаемых радиопомех на открытой измерительной площадке либо в ТЕМ-камерах подробно проанализирован в литературе [5, 6] и установлен стандартами [7, 8], поэтому далее остановимся только на тех аспектах, которые позволяют оценить эффект от использования управляемого джиттера. Излучения, формируемые цифровыми устройствами, переносятся к точке наблюдения, в которой размещена измерительная антенна. Если используется открытая измерительная площадка, то вариацией высоты и углового положения достигается максимизация показателей помехоэмиссии. В этих процессах важным является то, что процесс трансформации помехонесущих токов в напряжение на входе измерительного приёмника может быть описан комплексной передаточной функцией Ψ(f), которую можно считать постоянной в некоторой окрестности произвольной частоты f. Следовательно, гармоникам каждого разложения в ряд (4) можно сопоставить значения передаточной функции Ψ(n×f0). При этом её вид зависит от конструкции цифрового устройства и свойств измерительной установки. Поскольку анализ эффективности использования управляемого джиттера проводится в узкой полосе частот вблизи частот n×f0, то правомерно принять Ψ(n×f0) = 1, что и будет использоваться далее.
Стандарты [7, 8] предписывают использовать измерительные приёмники и анализаторы спектра с заданным видом частотной селективности. В классическом случае она обеспечивается двухкаскадным резонансным фильтром с индуктивной связью. В [9] показано, что амплитудно-частотная характеристика при идентичности элементов контура описывается уравнением (см. формулу 5), где a = 2×Q(f – fH)/ fH – относительная расстройка на частоте f, fН – частота настройки фильтра, kC – коэффициент связи между контурами; при этом kC = Q×M/L, где M – взаимная индукция, L – значение индуктивности в каждой из двух ветвей контура, n – количество одинаковых каскадов в контуре. Обычно принимается, что kC = 1, n = 2 [9].
Ширина полосы пропускания фильтров, используемых при измерениях по электромагнитной совместимости, определяется по уровню –6 дБ, чему, как следует из (5), соответствует относительная расстройка α-6=√2. Полосы частот по уровню –6 дБ и –3 дБ, которые обозначим Δf–6 и Δf, связаны соотношением Δf–6 = α–6Δf. С учётом этого выражение (5) приобретает простой вид g(α) = 4/(4+α4), а относительная расстройка может быть рассчитана вне категорий, связанных с номиналами элементов контуров, по формуле (6).
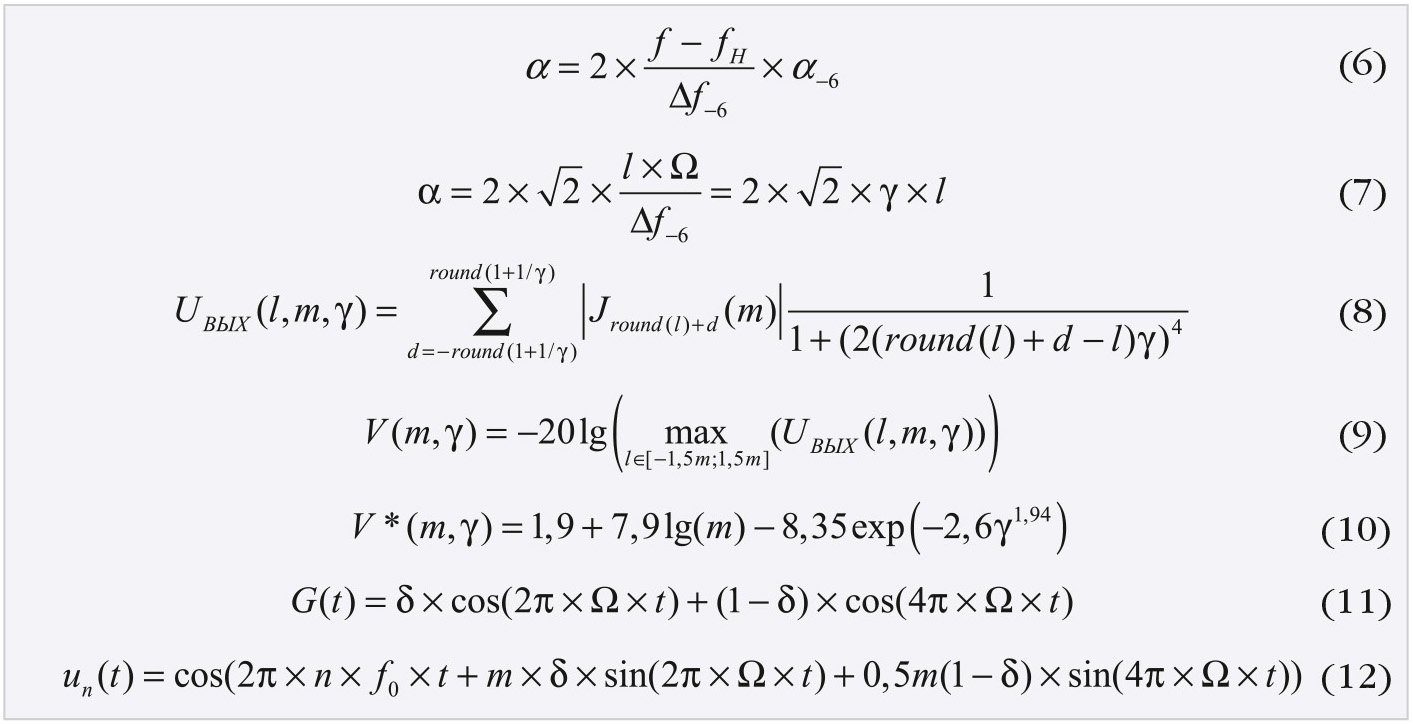
Для измерений в области ЭМС используют фильтры с Δf–6 = 0,2; 9; 120 кГц для диапазонов частот 9…150 кГц, 0,15…30 МГц, 30…1000 МГц. На качественном уровне очевидно, что если в полосу пропускания фильтра попадает две и более спектральных составляющих, то на выходе фильтра уровень сигнала будет более высоким, чем для одной из них. Введём характеристику охвата смежных спектральных составляющих фильтром γ = Ω/Δf–6. Тогда уравнение (6) преобразуется в (7), где параметр l характеризует отстройку в значениях Ω и математически аналогичен значению i в уравнении (4), но может принимать и нецелые значения.
Оценка значений параметров m и γ для типовых цифровых устройств
Для проведения дальнейшего анализа необходимо определить типовые значения параметров m и γ. Частота f0 в зависимости от назначения цифрового устройства может лежать в интервале 105…109 Гц, а значение k, выбираемое при технической реализации управляемого джиттера, – в интервале 0,0001…0,01, если исходить из гарантированного сохранения его стабильной работы.
Значение Ω рекомендуется выбирать на основе возможностей обнаружения расщепления спектра современными анализаторами спектра последовательного действия, например в интервале 103…105 Гц. С учётом принятых значений Δf–6 первичная оценка интервала значений γ составляет от 0,01 до 5000, а значения m – от 10–4 до 104.
Приведённые формальные оценки значений параметров m и γ нуждаются в корректировке, т.к. при их получении не были учтены особенности расщепления спектра и формирования результатов оценки помехоэмиссии на конкретной частоте. Наибольший эффект от расщепления спектра будет достигаться тогда, когда в пределах полосы Δf–6 будет находиться только одна гармоника, что соответствует γ > 0,5…1. Если значение m мало, то в этом случае спектр, соответствующий каждой гармонике периодического прямоугольного сигнала, будет состоять всего из трёх составляющих с частотами n×f0 – Ω, n×f0, n×f0 + Ω и амплитудами, приближённо равными –an×m/2, an, an×m/2, что означает практическое отсутствие снижения помехоэмиссии. Значение индекса модуляции m должно быть не менее 2…5, иначе даже при выполнении условия γ > 1 использование УД не даст заметного эффекта по снижению помехоэмиссии.
Методика и результаты моделирования расщепления спектра в приложении к управляемому джиттеру
Целью выполнения моделирования является оценка достижимого уровня снижения помехоэмиссии, который зависит от параметров m и γ. Моделирование проводилось в частотной области с нормированием по значению Ω, что необходимо для ухода от конкретных номиналов частот.
Известно [4], что ширина полосы частот, занятая гармониками сигнала с однотональной угловой модуляцией, симметрична относительно центральной частоты и составляет П ≈ 2×m×Ω, включая гармоники с номерами от –2×m до 2×m, но для моделирования этот интервал целесообразно увеличить в 1,5 раза. Функция (5) описывает фильтр с крутым спадом амплитудно-частотной характеристики, и количество гармоник, учитываемых при расчёте выходного напряжения фильтра, можно оценить как round(1 + 1/γ), где round() – функция округления. Если имитировать сканирование по частоте изменением параметра l, принять значение an = 1, то максимум напряжения на выходе фильтра можно найти на основе следующего уравнения, полученного из формулы (5) (см. формулу 8).
Использование функции модуля в составе уравнения (8) обусловлено тем, что амплитуды составляющих спектра могут быть как положительными, так и отрицательными, т.е. имеющими сдвиг по фазе на 180°. Фазовые соотношения между суммируемыми гармониками, как следует из уравнения (8), не учитываются, поскольку в худшем случае они сложатся по амплитуде. Следовательно, результаты моделирования, получаемые на его основе, будут давать в общем случае не наблюдающуюся оценку максимума показания средства измерений для заданной отстройки при синфазном сложении спектральных составляющих. Это важное обстоятельство следует учитывать при оценке результатов расчёта по формуле (8) для значений γ < 0,5.
 при m = 10 и γ = 0,2; 0,5; 2")
Оценим влияние значений γ и m на выходное напряжение фильтра. На рисунке 1 показаны графики зависимости UВЫХ(l, m, g) , построенные для m = 10 и γ = 0,2; 0,5; 2. Для значения γ = 2 каждая спектральная составляющая выделяется фильтром в отдельности, как это следовало из проведённого ранее качественного анализа. Гармонические составляющие отображены на рисунке маркированными отрезками. При уменьшении значения γ в полосу фильтра попадает большее количество гармоник, в результате чего максимальное значение выходного напряжения повышается, и при γ ≈ 0,25 оно превосходит единичное значение, устанавливающее порог снижения помехоэмиссии. Таким образом, рекомендация о том, что значение γ должно быть не менее 0,5…1, получила наглядное подтверждение.
 при γ = 2 и m = 4, 10, 20")
На рисунке 2 показаны графики зависимости UВЫХ(l, m, γ), построенные для γ = 2 и m = 4, 10, 20. Гармонические составляющие отображены на рисунке маркерами. Для m = 4 и 10 введено смещение на 0,5 и 1 для лучшей наглядности. Увеличение значения m приводит к большему расширению спектра в окрестности частоты n×f0 с одновременным уменьшением средней амплитуды спектральных составляющих. Следовательно, эффект по снижению помехоэмиссии будет значительнее при реализации управляемого джиттера с большим значением m, причём его следует оценивать для n = 1, учитывая, что для высших гармоник значение индекса модуляции будет увеличиваться пропорционально n, и уровень каждой спектральной составляющей будет ещё ниже.
Как видно из представленных графиков, уровни гармонических составляющих зависят от номера гармоники, но эта зависимость не является монотонной в пределах значений индексов i от -2m до 2m. В качестве характеристики эффективности будем использовать значение минимально достижимого ослабления, являющееся функцией параметров γ и m (см. формулу 9).
Уравнение (9) построено на основе сопоставления максимальной амплитуды гармонических составляющих, возникающих при расщеплении спектра, с единичной амплитудой синусоидального сигнала на частоте n×f0 в отсутствие УД.
Задача получения графиков функций V(m, γ) может быть решена с использованием математических методов, применяемых для обнаружения глобальных экстремумов функций [10], но наиболее простым подходом является последовательный перебор значений UВЫХ(l, m, g) при изменении l с малым шагом и определением максимума. На рисунке 3 представлены графики зависимости V(m, γ), построенные для шага Δl = 3×m/N, где N = 104 для значений γ = 0,5; 1; 5.
 при γ = 0,5; 1; 5 и m = 1…100")
Линейный характер функции V(m, γ) для постоянного значения γ позволяет перейти к аппроксимирующей функции V*(m, γ), предназначенной для оценки минимального снижения помехоэмиссии в ходе проектирования цифровых устройств с УД и не требующей выполнения громоздких расчётов. Такая функция имеет вид (см. формулу 10).
Погрешность аппроксимации не превышает 1 дБ при γ ≥ 1. Функция (10) применима для γ ≥ 0,5, и если γδ ≥ 5, то она не проявляет значимой зависимости от этого параметра. Таким образом, мы получили расчётную оценку минимального снижения помехоэмиссии за счёт расщепления спектра в виде сравнительно простого соотношения, имеющего непосредственное практическое применение.
Другие виды управляющей функции G(t)
В качестве функции G(t) может использоваться любая зависимость, отвечающая введённым выше требованиям, причем её периодический характер позволяет разложить её в гармонический ряд. Для оценки целесообразности использования других видов функции G(t) при реализации УД следует использовать это обстоятельство.
Для определения границ изменения спектрального состава рассмотрим функцию G(t), включающую только две гармоники с нулевым фазовым сдвигом для обеспечения выполнения условия |G(t)| ≤ 1, а также параметром δ, определяющим соотношение между гармониками (см. формулу 11).
Тогда w(t) = 2p×n(f0 + k×f0×δ×cos(2p×Ω×t) + k×f0(1 – δ)×cos(4p×Ω×t)), откуда в соответствии с уравнениями (2) и (3) при an = 1 имеем (см. формулу 12).
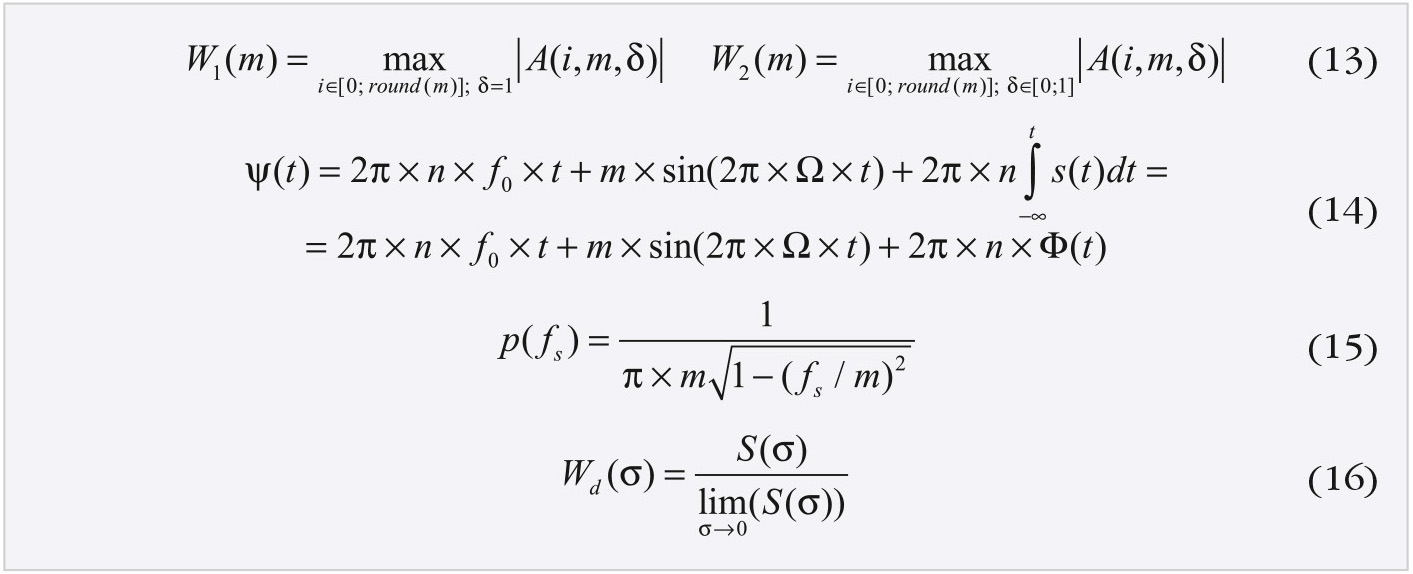
Значение δ лежит в интервале от 0 до 1. При δ = 1 уравнение (12) преобразуется к виду (3), и из его структуры следует, что вторая, модулирующая по частоте гармоника имеет меньший индекс модуляции, что соответствует увеличению уровня спектральных составляющих. Для подтверждения этого положения следует использовать классический гармонический анализ, реализуемый численными методами, поскольку непосредственное использование функций Бесселя здесь крайне затруднено самой структурой уравнения. Степень изменения спектральных будет зависеть от значения δ, и для оценки влияния второй гармоники в предположении выполнения условия γ ≥ 1 можно использовать сопоставление функций (см. формулу 13), где A(i, m, δ) – коэффициенты разложения функции (12) в ряд Фурье, полученные при f0 = 0, что соответствует смещению первой гармоники на нулевую частоту и упрощает проведение вычислений, не влияя на амплитуду спектральных составляющих. Выражения (13) учитывают, что A(i, m, δ) = A(–i, m, δ). Их графики, а также функции отклонения Δ(m) = ((W2(m) – W1(m))/W1(m))×100% представлены на рисунке 4. Вычисление зависимостей W1(m) и W2(m) выполнялось методом перебора значений амплитуд гармоник в указанном интервале номеров, для расчёта функции W2(m) значения параметра δ изменялись с шагом 0,01. Графики функций W1(m) и W2(m) нормированы относительно значения an.
, W2(m), Δ(m)")
Как видим, введение второй гармоники в функцию управления приводит к увеличению максимального уровня спектральных составляющих на 30…60% в диапазоне значений m от 20 до 100. Это следует и из теории [4], согласно которой уменьшение индекса модуляции всегда приводит к повышению уровня спектральных составляющих за счёт распределения энергии несущей в более узкой полосе частот.
Отсюда следует вывод о том, что использование функции G(t) в формах, отличных от моногармонической, будет всегда приводить к снижению эффекта от использования УД. В пользу использования такой функции управления говорит и сравнительная простота технической реализации.
Управляемый и неуправляемый джиттер в цифровой системе
В цифровых системах джиттер может иметь различную природу, в т.ч. зависеть от последовательности бит в передаваемом информационном потоке [3]. Все приведённые выше формулы были получены в предположении отсутствия в цифровых устройствах джиттера любой иной природы. Однако в реальных системах джиттер всегда присутствует, и потому его влияние на расщепление спектра из-за УД необходимо оценить.
Классический джиттер обусловлен преимущественно случайными процессами. Если не учитывать датазависимый джиттер, то частота произвольной гармоники при использовании УД будет описываться уравнением ω(t) =2π×n(f0 + k×f0×cos(2π×Ω×t) + s(t)), где s(t) – случайный сдвиг по частоте, который имеет нормальное распределение, в результате гармоника с номером n приобретает случайный сдвиг по фазе Ф(t) (см. формулу 14).
Случайная функция Ф(t) также имеет нормальное распределение, что следует из правил суммирования погрешностей. Это распределение имеет нулевое математическое ожидание и дисперсию σ, которая определяет случайную составляющую фазу. Слагаемое m×sin(2π×Ω×t) можно рассматривать как дающее случайный сдвиг по частоте fs с интервалом возможных значений –m…m, характеризующийся арксинусоидальным распределением [11], плотность вероятности которого определяется выражением (см. формулу 15).
Слагаемое 2π×n×Ф(t) в уравнении (14) может рассматриваться как случайный сдвиг по времени для каждого периода исходного сигнала, и поэтому он будет переходить в состав каждой из спектральных составляющих в качестве паразитной фазовой модуляции. Результатом этого будет уменьшение амплитуды, которое будет зависеть от значения σ. Для оценки влияния случайного джиттера целесообразно рассмотреть вызванное им усреднённое изменение амплитуд гармоник S(σ) и в качестве показателя такого изменения ввести функцию (см. формулу 16).
Для выполнения оценочных расчётов необходимо определить максимальное значение s, например на основе данных спецификации распространённых цифровых интерфейсов. Согласно спецификации шины USB 3.1 gen 1 [12], на случайный джиттер отводится не более 20,5% битового интервала для сигнала на входе приёмника или 41% периода рассматриваемого сигнала, что можно принять соответствующим интервалу в 6σ с вероятностью 99,7% [13]. Отсюда значение σ составляет около 7% в долях периода следования прямоугольных импульсов. Примем максимальное значение σ равным 0,1.
При выполнении расчётов, значения функций S(σ) определялись с учётом требований по статистической повторяемости на основе многократного разложения в ряд Фурье функции ug(t) = cos(2π × F × t + 2π × Ak), где Ak – случайная величина, постоянная для периода k функции cos(2π × F × t) при отсчёте значений t от начальной временной точки –0,5N/F, причём N >> 1. Значения Ak определялись розыгрышем нормально распределённой случайной величины с дисперсией σ. Функции S(σ) присваивалось усреднённое значение гармоники N такого разложения, полученное для пятидесятикратной реализации изложенного алгоритма.
Результаты расчёта функции Wd(σ), полученные при N = 100, представлены на рисунке 5. Выбранные параметры расчёта обеспечили статистическую сходимость не хуже 1%. Как следует из представленного графика, увеличение дисперсии случайной фазы приводит к некоторому снижению амплитуд спектральных составляющих расщеплённого спектра за счёт сопутствующей модуляции случайными процессами. При σ = 0,1 снижение произвольной составляющей спектра в окрестности частоты n×f0 составит около 1,7 дБ.
Для эффективного использования УД он должен быть явно выражен в ЦУ без маскирования случайным джиттером. Важным аспектом использования УД является то, что пределы изменения битового интервала не должны превысить границы, за которыми теряется стабильность функционирования ЦУ. Поэтому использование управляемого джиттера требует оценки характеристик остальных его составляющих с использованием современных средств измерений, и в некоторых случаях его использование будет невозможным в силу отсутствия достаточного запаса по джиттеру.
Обобщение полученных результатов на сигналы непериодического характера
Известно, что спектр непериодического сигнала является сплошным и соответствует огибающей линейчатого спектра этого же сигнала с периодическим повторением, что обусловлено слиянием его линий при предельном переходе к бесконечному периоду повторения [4]. В общем случае в картине помехоэмиссии, формируемой ЦУ, будут наблюдаться как широкополосные помехи, так и спектральные пики, вызванные периодическими тактирующими сигналами. Исходя из принципа перехода к спектрам непериодических сигналов, использование управляемого джиттера будет приводить к снижению обоих компонентов помехоэмиссии. Таким образом, если периодический цифровой сигнал с УД как последовательность нулевых и единичных бит представлен совокупностью спектральных составляющих вблизи частот n×f0, то огибающая спектра для битовой последовательности произвольного характера уже не будет проходить через амплитудные значения гармоник (1), а будет находиться на уровне |an×Ji(m)| < |an|, что и определяет снижение помехоэмиссии.
Экспериментальная оценка эффективности использования УД для снижения эмиссии радиопомех, формируемых периодическими сигналами
Объект исследований, оборудование и измерительная оснастка. Как следует из теории УД, его проявление возможно при наличии зависимости частоты формирования импульсов от некоторого управляющего воздействия. В качестве объекта исследований был выбран кварцевый генератор (КГ), предназначенный для использования в ЦУ с компонентами КМОП или ТТЛ в источнике тактирования. Линейка КГ выбранного типа включает образцы с номиналами частот от 1 до 100 МГц. Для проведения эксперимента был выбран КГ с номиналом тактовой частоты 80 МГц.
В ходе предварительных исследований было установлено, что у КГ рассматриваемого класса проявляется слабая зависимость частоты выходного сигнала от напряжения питания. Взятый для измерений образец КГ продемонстрировал практически линейное изменение выходной частоты на 2000 Гц (k×f0 = 1000 Гц) при увеличении напряжения электропитания в интервале от 3,5 до 5,0 В при заявленном номинальном его значении 5 ±0,5 В. Работа КГ вне установленного диапазона напряжений питания в рамках проведённых экспериментов была обусловлена отсутствием в наличии КГ с управляемой частотой, хотя таковые, безусловно, на рынке имеются. При проведении измерений КГ и вспомогательные элементы размещались на макетной плате.
Кварцевый генератор работал в одном из двух режимов электропитания:
- постоянным напряжением при неизменной амплитуде выходного сигнала (режим 1);
- напряжением, изменявшимся по синусоидальному закону с частотой 1 кГц в интервале значений от 3,5 до 5 В при соответствующем уменьшении амплитуды выходного сигнала КГ (режим 2).
 при исследовании джиттера сигнала, формируемого КГ; б) при оценке уровня помехоэмиссии")
Схемы измерений, представленные на рисунке 6, включали в себя программируемый источник постоянного тока R&S HMP2030, на котором было установлено напряжение электропитания 5 В. Питание КГ в режиме 2 обеспечивалось путём подачи напряжения с измерительного усилителя в составе генератора АНР-1041 с выходным сопротивлением около 2,5 Ом. На вход усилителя подавалось выходное напряжение генератора R&S HMF2550, предназначенного для формирования сигналов стандартных и произвольных форм.
В обоих режимах кварцевый генератор работал без нагрузки, и к его выходу подключался изогнутый проводник длиной около 10 см. Поскольку потребляемый кварцевым генератором без нагрузки ток составляет в среднем менее 10 мА, и он зависит от напряжения на выходе КГ, то для стабилизации нагрузки источника питания параллельно выводам питания КГ было установлено сопротивление номиналом 51 Ом. Характеристики выходного сигнала генератора R&S HMF2550 выбирались таким образом, чтобы на этом сопротивлении без подключения КГ напряжение в режиме 2 изменялось в интервале от 3,5 до 5 В, после чего КГ устанавливался на макетную плату.
При исследовании помехоэмиссии с использованием схемы на рисунке 6б вблизи макетной платы размещалось ферритовое кольцо, через которое проходил один из проводов электропитания. Это необходимо для ослабления электромагнитного излучения от цепей питания КГ, которое в режимах 1 и 2 будет отличаться из-за разной конфигурации схемы. Согласно описанию [15], применявшееся ферритовое кольцо имеет полное сопротивление от 90 до 147 Ом в интервале частот 100…240 МГц.
В качестве основного средства измерений использовался осциллограф R&S RTO2044 с полосой 4 ГГц и четырьмя каналами. В схеме на рисунке 6а на первый канал осциллографа подавалось выходное напряжение КГ, а на второй (только в режиме 2) – напряжение электропитания. В схеме на рисунке 6б на первый канал также подавалось выходное напряжение КГ, а на второй – сигнал с пробника R&S RSE02 из комплекта R&S HZ-15, предназначенного для исследования электрических и магнитных полей.

Фотография измерительной установки при работе КГ в режиме 2 в ходе исследования помехоэмиссии приведена на рисунке 7. Микросхема, установленная на монтажную плату, не подключалась к напряжению электропитания и служила для неизменного размещения пробника ближнего поля R&S RSE02, что необходимо для обеспечения повторяемости и сопоставимости результатов измерений.
Результаты и особенности оценки джиттера КГ при наличии и отсутствии УД
Согласно представленному описанию измерительной установки, в режиме 1 джиттер выходного сигнала КГ должен определяться случайными факторами и иметь нормальное распределение. Для получения распределений джиттера, представленных на рисунке 8, использовался особый режим синхронизации с принудительным запуском развёртки через 1 мс, т.е. через период управляющего джиттером напряжения питания КГ.
 режим 1 – в отсутствие управляемого джиттера; б) режим 2 – при наличии управляемого джиттера")
На рисунке 8а представлена гистограмма распределения импульсов по частоте и результаты измерений в табличной форме, полученные при использовании схемы измерений, показанной на рисунке 6а. Распределение соответствует нормальному и имеет среднее значение M = 79,996 МГц. Среднеквадратичное отклонение σ составляет 60,85 кГц. Наличие двух максимумов, равноудалённых от среднего значения, указывает на наличие детерминированного джиттера [3, 14]. На рисунке 8б представлена аналогичная гистограмма для режима 2 работы КГ, имеющая характерный провал в районе средней частоты (М = 80,024 МГц) и максимумы вблизи частот 79,46 и 80,58 МГц (интервал изменения частоты 1120 кГц), симметрично расположенные относительно математического ожидания распределения. Значение σ в режиме 2 составляет 635 кГц. Это соответствует арксинусоидальному распределению, лежащему в существенно более широких границах, чем ожидаемые. Оно имеет превалирующий характер и маскирует нормальное распределение, имевшееся в режиме 1. Полученное противоречие между значениями интервала измерений частоты при постоянном напряжении питания из интервала от 3,5 до 5,0 В и при синусоидальном законе его изменения требует правильной трактовки.
При построении гистограммы осциллограф R&S RTO2044 отсчитывает значение частоты повторения импульсов относительно некоторого опорного уровня, выбранного автоматически на основе анализа входного сигнала. В то же время, как это видно в верхней части рисунка 8б, изменение напряжения электропитания по гармоническому закону приводит к модуляции импульсов на выходе КГ по амплитуде, в результате чего опорный уровень также требует смещения. Но поскольку он постоянен и работа КГ сопровождается непрекращающимися переходными процессами с нерегулярным смещением фронтов и спадов, измеренное значение произведения k×f0 составляет 560 кГц, что существенно превосходит определённое для статического режима значение 1 кГц. Если исходить из равенства k×f0 = 560 кГц, то для первой гармоники и частоты управления джиттером 1 кГц индекс модуляции составляет m = 560, что не соответствует действительности, т.к. для имеющегося образца КГ и выбранных условиях измерений для первой гармоники расчётное значение m = 1. Это подтверждают и приводимые далее результаты оценки снижения помехоэмиссии.
Представленный пример показывает, что при оценке границ колебаний частоты при реализации управляемого джиттера имеются особенности, которые могут привести к ошибочным результатам. При этом, как это было продемонстрировано в [14], осциллографы серии R&S RTO позволяют проводить анализ различных показателей джиттера. Снятие статической частотной характеристики КГ может быть выполнено как при помощи частотомера, так и с использованием спектрального анализа по вариации частоты первой гармоники.
Наблюдение расщепления спектра при переходе к УД и оценка снижения помехоэмиссии
Суть выполнения измерений состояла в оценке помехоэмиссии в отсутствие и при наличии УД в схеме, представленной на рисунке 6б. Поскольку формируемый КГ сигнал в режиме 1 является периодическим, то спектр помехоэмиссии будет включать ряд гармоник на кратных частотах, как это было показано выше. Для определения амплитуды использовалась функция быстрого преобразования Фурье (БПФ), реализуемая математической обработкой в осциллографе R&S RTO2044.
 в режиме 1 для всех гармоник; б) в режиме 2 для первой гармоники; в) в режиме 2 для второй гармоники; г) в режиме 2 для третьей гармоники")
На рисунке 9а представлены результаты оценки, полученные для режима 1 для первой, второй и третьей гармоник, а на рисунках 9б–9г – спектрограммы, построенные для режима 2 в окрестности их частот с полосой разрешения 100 Гц. Поиск максимумов спектра выполнялся в автоматическом режиме. Как видно из полученных результатов, гармоники претерпевают расщепление на отдельные составляющие. Для дальнейшего анализа результаты оценки амплитуд сведены в таблицу.

В данной таблице an’ обозначает уровень максимальной гармоники в окрестности частоты n×f0 при наличии УД, измеренное значение ослабления помехоэмиссии составляет V*изм = an – an’. Оценочные значения V* рассчитывались с использованием аппроксимирующего уравнения (10) при γ >> 1.
Как следует из таблицы 1, для первой и третьей гармоник разность теоретической и экспериментальной оценок составляет 0,5 и 1,1 дБ при наибольшей разнице в 3,1 дБ для второй гармоники, которая отсутствует в спектре идеализированной последовательности прямоугольных импульсов. Полученное расхождение в оценках эффективности управляющего джиттера определяется погрешностями:
- аппроксимирующего уравнения (10), оцениваемой в 1 дБ;
- измерений значений an и an’, которую можно оценить в 1 дБ и обусловленную некоторой неточностью позиционирования пробника ближнего поля.
Ожидаемый уровень чётных гармоник для периодических, например тактовых, сигналов будет находиться в среднем на 15…25 дБ ниже, чем уровень предыдущих нечётных гармоник. При использовании уравнения (10) для решения практических задач необходимо учитывать, что для чётных гармоник оно, по-видимому, будет давать более оптимистичные оценки снижения помехоэмиссии.
Важно отметить, что собственный джиттер выходного сигнала КГ, выраженный в разбросе значений периодов сигнала на гистограмме, показанной на рисунке 8а и особенно на рисунке 8б, существенно больше вводимой управляемой компоненты, которая даже не выражена в явном виде. Тем не менее спектрограммы, представленные на рисунке 9, убедительно говорят в пользу уменьшения помехоэмиссии при расщеплении гармонических составляющих. Следовательно, использование УД возможно и в системах с высоким уровнем собственного джиттера, обеспечивающего значительно больший разброс значений частоты, чем управляемая компонента. Это позволяет применять УД, например, в перспективных высокоскоростных интерфейсах и тактовых сигналах, а также ЦУ высокого быстродействия при значительных диэлектрических потерях в печатных платах и пониженном напряжении электропитания, которые всегда сопровождаются увеличением джиттера.
Таким образом, эффективность использования УД получила практическое подтверждение на примере периодических сигналов, реализующих тактирование в цифровых устройствах. Аналогичная оценка для непериодических битовых последовательностей требует проведения дополнительных экспериментов.
Особенности практической реализации управляемого джиттера в цифровых устройствах
Результаты, полученные в теории управляемого джиттера, указывают на основные пути его реализации. Поскольку ЦУ обычно имеет внешние подключения с использованием стандартных интерфейсов, то источник УД должен находиться непосредственно в ЦУ. Наиболее простым решением является использование тактовых генераторов с перестраиваемой частотой, при этом синусоидальный сигнал подаётся на управляющий вход тактового генератора.
При использовании УД типичное значение k лежит в интервале 0,0001…0,01, что даёт возможность сохранить стабильность работы ЦУ. В то же время описанное техническое решение, основанное на зависимости выходной частоты неуправляемых КГ от напряжения питания, нельзя рекомендовать к широкому практическому использованию по причине того, что уменьшение питающего напряжения приводит и к снижению выходного напряжения КГ сверх допустимого предела, что может стать источником сбоев в работе ЦУ. Для неуправляемых КГ зависимость частоты от напряжения питания не всегда является линейной. Потому реализация моногармонического закона управления тактовой частотой на основе простых схемных решений оказывается затруднённой. Наконец, снижение питающего напряжения, как это показано в [14], всегда повышает случайный джиттер, что может оказаться неприемлемым для некоторых видов цифровых устройств и интерфейсов.
Для реализации УД требуется продуманное и обоснованное использование специализированной компонентой базы.
Заключение
Использование УД является одним из способов снижения помехоэмиссии и относится к модификации сигналов – самому молодому из направлений электромагнитной совместимости. Эффективность использования УД для снижения помехоэмиссии получила теоретическое обоснование и экспериментальное подтверждение. Несмотря на то, что такое снижение не является самоцелью при проектировании ЦУ, в ряде случаев оно может стать наиболее дешёвым решением при доработке изделий и планировании мероприятий по обеспечению электромагнитной совместимости, что и определяет его ценность.
Практическое использование УД требует контроля параметров расщепления спектра с использованием рассмотренных ранее схем. В ходе приборного контроля оцениваются показатели управляемого и неуправляемого джиттера, контролируется снижение уровня спектральных составляющих и глазковые диаграммы (при необходимости). Основным требованием для таких измерений является высокое качество реализации соответствующих функций средств измерений, которое достигнуто, например, в осциллографах серий RTO и RTP компании Rohde&Schwarz.
Литература
- Кечиев Л.Н. Проектирование печатных плат для цифровой быстродействующей аппаратуры. М. ООО «Группа ИДТ». 2007. С. 616.
- Бузов А.Л., Быховский М.А., Васехо Н.В. и др. Управление радиочастотным спектром и электромагнитная совместимость радиосистем. Под ред. Быховского М.А. М. Эко-Трендз. 2006. С. 376.
- Кечиев Л.Н. Печатные платы и узлы гигабитной электроники. М. Грифон. 2017. С. 424.
- Баскаков С.И. Радиотехнические цепи и сигналы. М. Высшая школа. 2003. С. 462.
- Уильямс Т. ЭМС для разработчиков продукции. Пер. с англ. Кармашева В.С., Кечиева Л.Н. М. Издательский дом «Технологии». 2003. С. 540.
- Лемешко Н.В. Теоретические основы моделирования сертификационных испытаний радиоэлектронных средств по эмиссии излучаемых радиопомех. Монография. М. МИЭМ. 2012. С. 196.
- ГОСТ Р 51319-99 «Совместимость технических средств электромагнитная. Приборы для измерения индустриальных радиопомех. Технические требования и методы испытаний». М. Издательство Стандартов. 2000. С. 57.
- ГОСТ Р 51318.16.1.1-2007 «Совместимость технических средств электромагнитная. Требования к аппаратуре для измерения параметров индустриальных радиопомех и методы измерений. Часть 1-1. Аппаратура для измерения параметров индустриальных радиопомех и помехоустойчивости. Приборы для измерения индустриальных радиопомех». М. Стандартинформ. 2008. С. 58.
- Корякин В.С., Кравчук Ю.В., Лебедева О.В. и др. Измерители радиопомех. Под ред. Фастовского И.А. М. Связь. 1973. С. 152.
- Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы (6-е изд.). М. Бином. Лаборатория знаний. 2008. С. 636.
- Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Измерительные преобразователи. М. Энергоатомиздат. 1983. С. 320.
- Universal Serial Bus 3.2 Specification. Rev.1, 22.09.2017. URL: http://www.usb.org (дата обращения 22.10.2019).
- Гнеденко Б.В. Курс теории вероятностей. М. Эдиториал УРСС. 2001. С. 320.
- Лемешко Н.В., Струнин П.А. Современные возможности анализа джиттера в высокоскоростных цифровых устройствах на примере опции R&S RTO-K12. Контрольно-измерительные приборы и системы. 2019. №2. С. 21–31.
- Fair-Rite Product’s Catalog. Part Data Sheet. 044380640. 2014.
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





