
Введение
В настоящее время значительное внимание уделяется повышению надёжности функционирования электронных устройств, которая определяется используемой компонентной базой и режимами её эксплуатации. Практика показала, что такие показатели надёжности [1], как вероятность безотказной работы и средняя наработка на отказ, существенно снижаются при приближении компонентов к предельно допустимым режимам эксплуатации. В связи с этим выбор режима работы компонентов является важным условием обеспечения надёжности технических средств.
Одними из самых надёжных компонентов электрических схем являются герконы и реле на их основе, среди которых встречаются образцы с предельным количеством коммутаций свыше 100 млн. Как известно, коммутация в герконах осуществляется за счёт того, что контактная пара становится частью магнитной цепи, в результате чего между контактами действует сила тяги, подобная возникающей в зазоре между электромагнитом и якорем. В справочной документации для герконов указывают интервалы для двух параметров: магнитодвижущей силы (м.д.с.) срабатывания и отпускания. Однако этой информации недостаточно для оптимизации работы герконов и повышения их надёжности.
В работе [2] отмечается, что процесс перехода контактной пары геркона в замкнутое состояние сопровождается в среднем шестью отскоками контактов. Время дребезга может составлять до 10 мс в зависимости от силы первоначального их соударения. Если геркон работает под значительной токовой нагрузкой активного характера, особенно индуктивного, то каждый отскок будет сопровождаться искрением, которое приводит к эрозии контактов, их истончению, повышению переходного сопротивления и последующему излому [3]. Ещё одной проблемой является чрезмерная механическая нагрузка на области крепления контактов в корпусе геркона, которая приводит к ускорению старения материала и в перспективе – к появлению трещин и разрушению корпуса.
Анализ работы геркона показывает, что чрезмерное увеличение м.д.с. должно приводить к снижению времени первого соударения контактов при одновременном увеличении его скорости и, соответственно, количества отскоков, что приводит к значительному снижению ресурса работы геркона. Целью настоящей работы является выработка подходов к увеличению ресурса работы герконов, в первую очередь – в составе реле, и устройств на их основе, а также к сопутствующему снижению энергии, требующейся для срабатывания геркона.
Модель сближения контактов геркона при воздействии магнитного поля
Из законов механики следует, что отскок контактов в герконе происходит в результате обмена импульсами движения, который возникает из-за ненулевых скоростей контактов в момент их первого соприкосновения [4]. Для оптимизации управления м.д.с. следует более тщательно рассмотреть процесс сближения контактов в герконе, модель которого может быть построена на основе известных законов механики.

Рассмотрим пару контактов в составе геркона (см. рис. 1), имеющих постоянные жёсткости c1 и c2 в направлении силы тяги внешнего магнитного поля. Будем считать, что контакты движутся от своих крайних положений к точке соприкосновения вдоль прямой (на иллюстрации показана пунктиром), параллельной оси Х, причём при отсутствии магнитного поля положение контактов 1 и 2 соответствуют координатам x1,0=0 и x2,0=A. Помещение геркона в магнитное поле приводит к тому, что система из двух контактов становится частью магнитной цепи, и между ними возникает некоторая сила тяги FM, которая стремится сблизить контакты и является функцией расстояния между ними, т.е. FM=FM(x2(t)–x1(t)). С другой стороны, при отклонении контактов 1 и 2 от положения равновесия возникают силы противодействия, обусловленные их деформацией и равные c1x1(t) и c2(A–x2(t)) соответственно. Задавая механическую инерционность контактов массами m1 и m2, получим следующие выражения для зависимостей их ускорений от времени:
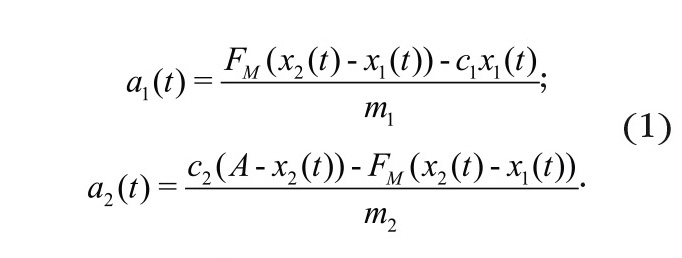
Далее необходимо определить зависимость силы тяги FM, возникающую между контактами геркона. Для этого следует проанализировать структуру магнитной цепи, в которой создаётся данная сила. Известно, что для электромагнита с одним зазором малых размеров δ сила тяги, не зависящая от его размеров, определяется формулой Максвелла и составляет
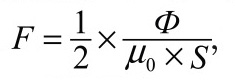
где µ0=4π×10–7 Гн/м – магнитная постоянная; Ф – магнитный поток; S – площадь сечения магнитного потока [5].
Однако эта формула не подходит для случая геркона, поскольку вне зависимости от конструкции катушки, создающей магнитное поле, замкнутые силовые лини магнитного поля проходят большую часть вне ферромагнитных элементов, образующих магнитопровод, и по этой причине аналогия с классическим электромагнитом не может быть использована.
Для определённости будем считать, что геркон расположен внутри катушки с совпадением осей их симметрии. Контактную пару можно рассматривать как фрагмент магнитопровода малого сечения, в котором имеется один зазор, соизмеримый с размерами сечения магнитного потока. Это случай, соответствующий магнитному приводу со значительным расстоянием перемещения сердечника, и он детально рассмотрен в теории проектирования реле [6], где показано, что зависимость силы тяги магнита от расстояния между якорем и сердечником определяется уравнением
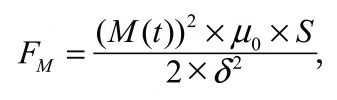
где M(t) –магнитодвижущая сила в магнитной цепи, изменяющаяся во времени.
Контакты геркона обычно выполнены из ферромагнетика с относительной магнитной проницаемостью µ >> 1. Известно, что магнитное сопротивление RM ~ 1/(µ×SM), где SM – площадь сечения участка магнитной цепи. В случае размещения геркона внутри катушки магнитный поток протекает двумя путями: через магнитопровод, образованный контактами, и вне его, причём для материала контактов значение µ составляет порядка 1000…10000. С учётом столь большого значения µ сопротивления двух названных участков магнитной цепи будут одинаковыми, если диаметр катушки будет превосходить диаметр сечения контактов геркона в √μ раз. Для оценки распределения магнитного потока в контактах геркона и в остальном сечении катушки целесообразно обратиться к типовым условиям использования массово выпускаемых герконов.
В качестве примера рассмотрим геркон МКА-14103 [7], который имеет диаметр контактов 0,55 мм при рекомендуемом диаметре катушки 8,1 мм. Если считать, что для материала контактов µ=1000, то магнитное сопротивление контактной пары оказывается в 4,6 раза меньше, чем в остальном сечении катушки. Это означает, что 82,1% магнитного потока проходят через контакты геркона. Таким образом, если катушка весьма плотно охватывает геркон, то большая часть магнитного потока проходит через его контактную пару. В связи с этим в дальнейших расчётах будем полагать, что M(t)=k×N×i(t), где k=0,8 – коэффициент использования м.д.с; N – количество витков в катушке; i(t) – зависимость тока в катушке от времени. Исходя из этого, формула для силы тяги приобретает вид:
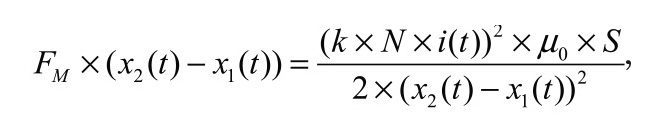
однако она требует некоторой корректировки.
Согласно экспериментальным исследованиям, с уменьшением расстояния между якорем и сердечником сила тяги увеличивается по квадратичному закону, но при их контакте имеет конечное значение. Как отмечается в [6], для практических расчётов можно полагать, что их сближение ограничено расстоянием δmin=0,1 мм. Исходя из этого, уравнения (1) могут быть записаны в виде:
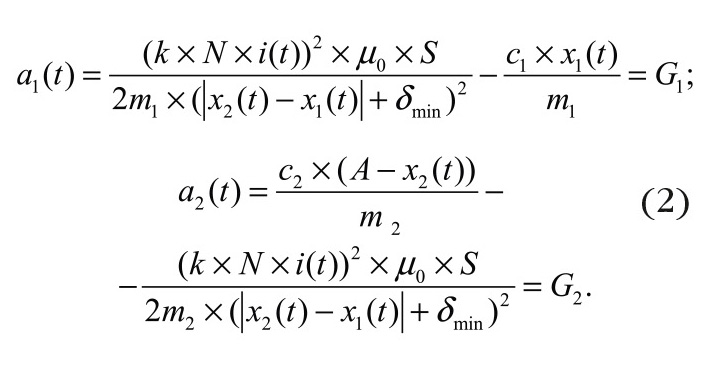
Построенная модель имеет ограничения по области адекватности, поскольку описывает сближение контактов геркона только до первого касания, если таковое вообще происходит для заданной функции i(t). Для дальнейшего анализа интерес представляют скорости движения контактов v1(t) и v2(t), а также координаты x1(t) и x2(t). Отсюда модель приобретает форму системы дифференциальных уравнений вида:
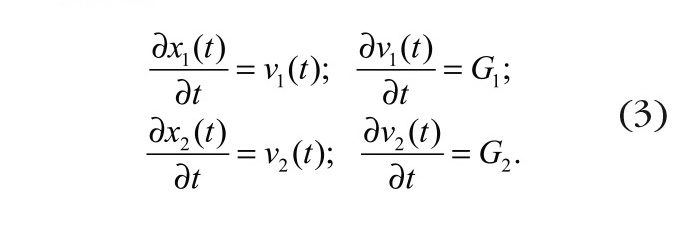
Для формулирования качественных и количественных выводов, являющихся основой для оптимизации формы тока в катушке, необходимо проанализировать результаты моделирования процесса сближения контактов.
Результаты моделирования процесса сближения контактов в герконе
Реле на основе герконов характеризуются сравнительно невысокой индуктивностью катушки из-за отсутствия ферромагнитного сердечника. Поэтому можно считать, что инерционность коммутации при внезапном появлении постоянного тока I в катушке в первую очередь обусловлена механическими процессами. В качестве рассчитываемых по модели характеристик введём время первого касания контактов tпк, а также энергетическую характеристику Эпк=I2×tпк. Как правило, контакты в герконе изготавливаются из одинаковых материалов, имеют симметричное расположение, одинаковые размеры и сходные точки закрепления, что даёт возможность охарактеризовать их одинаковой массой. Исходя из этого, можно ожидать численного равенства скоростей v1(t) и v2(t). Поэтому вместо них в дальнейшем будет использоваться единая функция v(t). Введём параметр vпк = v(tпк), характеризующий скорость движения каждого из контактов геркона в момент их первого касания. Основной целью моделирования является получение зависимостей показателей tпк, vпк и Эпк от значения тока I.
Уравнения (2) включают в себя ряд параметров, значения которых должны быть оценены на основе анализа типовой конструкции геркона, например МКА-14103 [7]. Герконы этой марки имеют симметричные контакты и массу не более 0,14 г. Для моделирования примем m1 = m2 = 0,03 г. Несмотря на малую площадь сечения контактов (около 0,26 мм2), они имеют весьма значительную жёсткость для обеспечения упругих деформаций и снижения контактного сопротивления, которая поддерживается специальным профилем их сечения, а также малым плечом приложения нагрузок. Для моделирования примем c1 = c2 = 10 Н/м. Площадь S, через которую протекает магнитный поток, можно приближённо определить соответствующей области возможного электрического контакта. Эта область имеет размеры 0,5 × 2 мм, т.е. S = 10–6 м2. Расстояние между контактами при отсутствии магнитного поля примем равным 1 мм.
Далее необходимо определить количество витков N. В информационном листе [7] даны рекомендации по параметрам катушки для изготовления реле на основе геркона, согласно которым рекомендуется использовать 5000 витков обмоточного провода диаметром 0,063 мм, что соответствует активному сопротивлению катушки около 870 Ом и напряжению питания около 5 В. Однако следовать этой рекомендации и при моделировании, и в экспериментальной части работы нецелесообразно, т.к. увеличение количества витков приводит к возрастанию индуктивности пропорционально N2, и, следовательно, снижается скорость нарастания тока в катушке при внезапном её подключении к источнику электропитания. Ввиду этого установим, что N = 40, что в типовом случае соответствует значению тока срабатывания 0,2…2 А (м.д.с. от 5 до 80 А) при его протекании в катушке с размещённым внутри герконом.
Из физики смыкания контактов в герконе следует, что система «геркон – катушка» характеризуется минимальным током Imin, при котором геркон ещё срабатывает. Для выбранных параметров модели значение Imin составляет около 803,035 мА. Замыкание контактов геркона при I ≈ Imin будет происходить силой магнитной тяги, минимально достаточной для его осуществления.
, x2(t), v(t), полученные путём моделирования: а) при I ≈ Imin, б) при I >> Imin, в) при I = 4 А и обнулении тока через 50 мс")
На рисунке 2 показаны графики, характеризующие процесс сближения контактов при I ≈ Imin и I >> Imin, причём значения x1(t) и x2(t) отсчитываются по левой оси ординат, а значения v(t) – по правой шкале. В первом случае зависимости x1(t) и x2(t) характеризуются наличием интервала времени, в котором контакты почти неподвижны, из-за чего время первого касания контактов увеличивается примерно до 28 мс. Если значение Imin определено с очень высокой точностью и выполняется строгое равенство I = Imin, то, согласно модели, контакты могут оставаться в промежуточном положении длительное время, и значение tпк не удаётся определить однозначно. Для реальных герконов в аналогичной ситуации завершение коммутации будет определяться случайными факторами, например внешним механическим воздействием или флуктуацией тока в обмотке катушки. На момент соприкосновения каждый из контактов имеет скорость vпк около 0,38 м/с, что с учётом процессов дополнительной механической деформации с высокой вероятностью исключает возникновение отскоков. Если I = Imin, то теоретически соприкосновение контактов происходит при нулевой скорости, но время первого касания не определено.
На рисунке 2б показаны аналогичные графики для I = 4 А. В этом случае tпк = 1,09 мс, т.е. первое касание контактов происходит более чем на порядок быстрее. Но при этом v(tпк) = 2,45 м/с. Учитывая удвоение скорости при встречном соударении, при таком режиме работы контактной пары геркона будут наблюдаться многочисленные отскоки и повторные соударения. Несмотря на существенное снижение времени первого соприкосновения контактов, вопрос о времени завершения срабатывания остаётся открытым, поскольку длительность дребезга контактов может существенно превышать значение tпк для фиксированного тока в обмотке катушки. Однако представленная модель не позволяет оценивать время окончательного перехода контактной пары геркона в проводящее состояние из-за ограниченной области адекватности.
")
")
")
Далее рассмотрим зависимости tпк(I), vпк(I), Эпк(I), полученные по результатам моделирования геркона с теми же параметрами. Первая из них представлена на рисунке 3. При увеличении тока I, начиная со значения Imin, время первого соударения контактов резко уменьшается, но в дальнейшем эта тенденция заметно ослабевает. При изменении тока от 2 до 4 А значение tпк снижается с 2,25 до 1,09 мс. При I = 0,9 А значение этого параметра составляет около 6,8 мс. На рисунке 4 показан график функции vпк(I), являющий собой почти линейную зависимость, причём значение скорости увеличивается с 0,4 до 2,45 м/с при изменении тока от 0,827 до 4 А. Далее, на рисунке 5, показан график функции Эпк(I), имеющий минимум в интервале от 0,87 до 1,1 А со значением около 5,5 А2•мс.
На основе графиков, приведённых на рисунках 3 – 5, можно сделать следующие выводы.
-
При I ≈ Imin переход контактной пары геркона в стабильно замкнутое состояние характеризуется большой длительностью и высокими затратами энергии на достижение первого касания контактов.
-
Поскольку минимизация значения vпк всё же не является гарантией работы контактной пары без отскока, но значительно увеличивает её вероятность, то по результатам моделирования можно рекомендовать режим срабатывания геркона, обеспечиваемый при I = (1,1…1,2)Imin.
Результаты, полученные в ходе моделирования, требуют постановки двух важных для практики вопросов. Первый: необходимо ли поддерживать ток в катушке в течение всего сближения контактов. Ответить на него позволяют графики, приведённые на рисунке 2в. Они построены для следующей зависимости тока от времени:

При гипотетическом мгновенном исчезновении тока в катушке при t = 0,5 мс контакты всё равно сомкнутся (см. рис. 2в), т.к. они имеют запас по кинетической энергии, достаточный для преодоления собственной упругости. При этом tпк = 2,27 мс, vпк = 0,12 м/с, Эпк = 0,0182 А2•мс. Если считать, что после соприкосновения контактов ток в обмотке остаётся выше минимально необходимого для их удержания в соприкосновении, то процесс срабатывания геркона будет вполне успешным. Такое решение позволяет снизить скорость соударения контактов, но имеет и существенный недостаток. Если геркон подвергается механическому воздействию в форме вибрации или ударов, то после снижения тока возможно нарушение взаимного сближения контактов, в результате чего срабатывание геркона не наступит вообще. Поэтому такой подход к управлению герконом нельзя считать универсальным.
Второй вопрос состоит в целесообразности использования согласованного управления, т.е. таких форм тока i(t), которые обеспечивают сравнительно небольшое значение tпк при минимизации скорости первого соударения. Проведённые расчёты показали, что режим с vпк → 0 вполне осуществим путём постепенного снижения тока в катушке, но его применение требует значительного усложнения схемы управления током и индивидуального режима управления для каждого образца геркона.
В отличие от рассмотренной модели, результаты экспериментов с герконами отражают наиболее значимые явления в их срабатывании и, конечно же, не утрачивают адекватности после первого касания контактов. В то же время усложнение модели (3) не несёт в себе практической ценности, поскольку оценка параметров соударения и отскока контактов потребует знания механических свойств материалов контактов и корпуса, а это крайне затруднит выбор исходных данных для использования модели. Ввиду этого рассмотренные показатели достижения первого касания контактов целесообразно определять экспериментально, а в дополнение к ним ввести время завершения коммутации tзк, длительность механической релаксации tp = tзк – tпк, количество отскоков K, которые также являются функциями тока в катушке и зависят от его формы.
Систему «геркон – катушка» с фиксированной конструкцией следует охарактеризовать измеренными значениями токов срабатывания Iс > Imin и отпускания Io, при которых ещё не допускаются нарушения при срабатывании и отпускании. Значение Iс будет зависеть от скорости изменения тока, что связано с уровнем накопленной механической энергии встречного движения контактов. Тогда рекомендуемый режим срабатывания будет обеспечен при токе Iз = (1,1…1,2)Iс.
Эта первичная рекомендация, как будет показано во второй части статьи, подлежит уточнению по результатам измерений.
Литература
- Козлов Б.А., Ушаков И.А. Справочник по расчёту надёжности аппаратуры радиоэлектроники и автоматики. М.: Советское радио, 1975. 472 с.
- Левшина Е.С., Новицкий П.В. Электрические измерения физических величин. Измерительные преобразователи. М.: Энергоатомиздат, 1983. 320 с.
- Хольм Р. Электрические контакты. М.: Издательство иностранной литературы, 1961. 464 с.
- Трофимова Т.И. Курс физики, 11-е изд. М.: Издательский центр «Академия», 2006. 560 с.
- Бессонов Л.А. Теоретические основы электротехники. Электрические цепи. 9 изд. М.: Высшая школа, 1996. 638 с.
- Цопов Г.И., Сергеев Г.А., Овсянников В.Н. Проектирование и расчёт электромагнитного устройства низкого напряжения. Учебно-методическое пособие. Самара: Самарский ГТУ, 2013. 53 с.
- Контакт магнитоуправляемый герметизированный МКА-14103. Информационный лист. Ред. от 29.04.2015. Интернет-ресурс www.chipdip.ru (дата обращения 30.10.19).
- Техническое описание к герконам марки КЭМ. Интернет-ресурс www.chipdip.ru (дата обращения 20.11.19).
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!



