
Введение
Значительную часть современного производственного оборудования составляют электроприводы механизмов с упругими передачами, которые называют упругомассовыми системами (объектами) [1–4].
Существенной особенностью такого рода объектов является взаимное влияние друг на друга механической и электрической частей устройства, т.е. упругие колебания в механической части приводят к возникновению колебательных режимов в электроприводе, что существенно усложняет управление объектом.
Постоянно возрастающие требования к качеству управления технологическими процессами вынуждают проектировщиков управляющих устройств учитывать упругие свойства таких объектов и, следовательно, использовать более точные математические модели для их описания.
Известно, что большинство известных методов синтеза автоматических систем управления базируется на использовании математической модели управляемого объекта. Для синтеза упругомассовых систем эти методы применимы далеко не всегда, т.к. на практике получить адекватное математическое описание упругих свойств объекта зачастую трудно, а иногда и невозможно. Это связано с погрешностями измерений, старением оборудования, внешними возмущениями, влияющими на характеристики объекта.
В подобных случаях выходом из положения может стать использование адаптивных алгоритмов, предназначенных для управления так называемыми неопределёнными объектами (НО), т.е. объектами с неизвестной математической моделью, иначе, объектами типа «чёрный ящик» [5–8]. Такой подход представляется авторам весьма перспективным направлением в современной теории управления.
Статья посвящена некоторым вопросам приложения алгоритмов данного класса к задачам управления упругомассовыми объектами.
Принцип действия и алгоритмическое описание адаптивной системы управления неопределённым объектом
Схема адаптивной системы управления НО показана на рисунке 1.

Как видно из рисунка, система представляет собой цифроаналоговую структуру, состоящую из неопределённого динамического объекта (НО) и адаптивного регулятора, реализованного программно в управляющем компьютере (УК). Объект и регулятор связаны между собой преобразователями АЦП/ЦАП.
Система функционирует следующим образом.
Задающее воздействие (уставка) формируется в УК в виде дискретного сигнала gk (k =1, 2…), который поступает на вход адаптивной обратной модели объекта (АОМ). На выходе АОМ формируется дискретный управляющий сигнал uk, который после преобразования в ЦАП подаётся на вход НО. Одновременно сигнал gk поступает на вход эталонной модели системы (ЭМ), на выходе которой формируется эталонный (желаемый) процесс для управляемого объекта xkэт. Выходной сигнал объекта x после преобразования в АЦП поступает на вход УК, где сравнивается с сигналом xkэт, в результате чего вычисляется сигнал рассогласования (ошибка управления) системы по формуле:
Целью управления является адаптивная минимизация среднеквадратической ошибки (СКО) (1). Для решения этой задачи АОМ объекта реализуется в виде адаптивного трансверсального фильтра (АТФ) [5].
Его уравнение имеет вид:
где L – число весовых коэффициентов фильтра wlk, которые в процессе адаптации перестраиваются по методу наименьших квадратов (Least Mean Square, LMS) в соответствии с рекуррентным соотношением:
где µ – параметр (шаг) сходимости адаптивного алгоритма (3).
В данном случае суть адаптации заключается в том, что после завершения процесса перестройки вектор весовых коэффициентов оптимизируется таким образом, что среднеквадратическая ошибка E[εk2] становится равной своему минимальному значению, которое зависит от заданной относительной средней величины СКО M, которая ограничена пределами [6]:
Для устойчивой работы алгоритма (3) должно выполняться условие:
где – средняя мощность сигнала gk.
В отличие от традиционных принципов автоматического управления, в данной структуре, как и в системах [5–8], не используется физическая отрицательная обратная связь между выходом объекта и входом системы. Её роль играет функциональная обратная связь, замыкающаяся через адаптивный процесс.
Из приведённого алгоритмического описания видно, что управление по принципу адаптивного обратного моделирования не требует знания математической модели объекта, так как управляющее воздействие формируется только на основе информации о текущих значениях сигналов gk и ek.
Методика синтеза
Синтез адаптивной системы – задача нетривиальная, т.к. из-за неопределённости объекта трудно получить однозначное решение в каждом отдельном случае. В данной работе предпринята попытка формализовать эту процедуру, которая здесь сводится к выбору параметров АОМ и ЭМ. Как показано в [8], для этого достаточно иметь лишь некоторую априорную информацию о динамических свойствах НО, например, о форме его переходной характеристики и/или о времени её установления tуст.
Процедура синтеза рассматриваемой системы сводится к следующим действиям:
- задаётся шаг (интервал) дискретизации сигналов по времени Т из условия:
где Tалг – ориентировочное время обработки информации в управляющем компьютере и преобразователях ЦАП/АЦП;
- выбирается эталонная модель системы (ЭМ). Это может быть динамическое звено любого вида, однако практика показала, что во многих случаях хорошие результаты получаются при использовании в качестве ЭМ апериодического звена первого порядка с передаточной функцией:
где Kэт – желаемый коэффициент передачи системы, а Tэт – постоянная времени, которая задаётся соотношением:
- задаётся желаемая относительная ошибка адаптации системы М (4);
- выбираются параметры L и µАОМ из условия (5), в котором в качестве средней мощности входного сигнала системы E[gk2] используется её предельно допустимое по условиям эксплуатации значение.
Слабым местом методики синтеза рассматриваемой структуры является отсутствие возможности теоретической оценки верхнего предела параметра М, соответствующего границе устойчивости системы, поэтому расчётные параметры должны уточняться в процессе её функционирования.
Имитационное моделирование адаптивной системы управления упругомассовым объектом
Для иллюстрации процедуры и результатов синтеза системы необходимо иметь имитационную модель неопределённого объекта. С этой целью используем структурную модель двухмассового электропривода [4], которая достаточно корректно отражает упругие свойства системы «электродвигатель – рабочий орган».

На рисунке 2 приведена расчётная схема двухмассовой механической части электропривода, а на рисунке 3 – обобщённая структурная схема объекта «электропривод – двухмассовый механизм».

На схемах приняты следующие обозначения величин и параметров: J1 и J2 – моменты инерции первой (ротор двигателя) и второй (рабочий орган) масс соответственно; J1 и J2 – их угловые скорости; C12 и b – приведённый коэффициент жёсткости и коэффициент внутреннего вязкого трения кинематической передачи;
M – момент, развиваемый двигателем; Mс – момент сопротивления нагрузки; U и Uу – управляющее и выходное напряжения силового преобразователя напряжения; Ia – ток якорной цепи электродвигателя; Ксп и Тсп – коэффициент передачи и постоянная времени силового преобразователя; Rа и Та – активное сопротивление и постоянная времени якорной цепи, С – конструктивная постоянная двигателя.
Используя численные значения параметров, приведённые в [4], преобразуем данное структурное представление (без учёта пренебрежимо малой постоянной времени силового преобразователя Тсп) к передаточным функциям объекта, где выходами являются измеряемые угловые скорости ротора двигателя и рабочего органа:
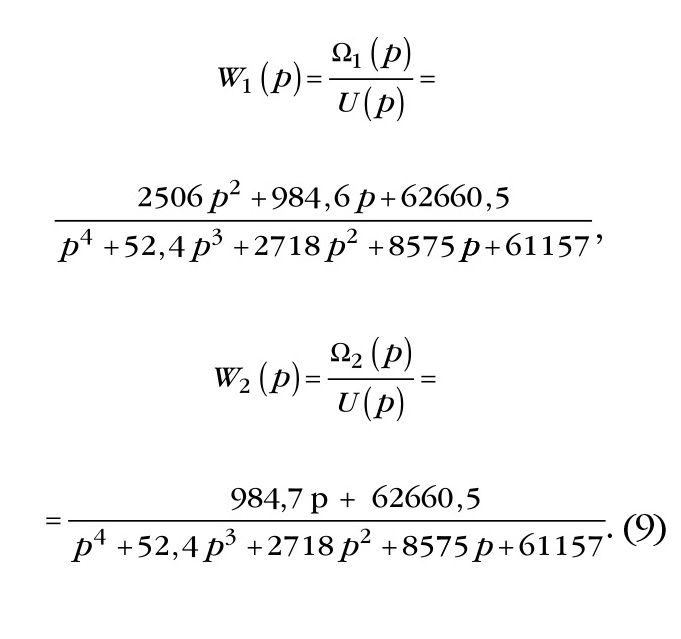
На рисунке 4 показаны переходные характеристики двухмассового объекта, полученные в среде MATLAB по передаточным функциям (9).
 и рабочего органа Ω2(t) при U(t) = 1 B")
Здесь синим цветом отображена характеристика Ω1(t), а зелёным цветом – характеристика Ω2(t) при подаче на вход объекта нормированного напряжения U(t) = 1 B.
По характеристикам определяем время установления переходных процессов: по каналу U → Ω1 : tуст1 = 1,63С, по каналу U → Ω2 : tуст2 = 1,63С.
Из рисунков видно, что оба процесса представляют собой затухающие колебания со значительным перерегулированием: для Ω1 : δ1 = 13%, для Ω1 : δ1 = 38%, при этом число колебаний скорости Ω2 за время установления N2 = 1,5.
Как сказано выше, рассматриваемая управляющая структура гарантирует адаптивную минимизацию среднеквадратической ошибки управления неизвестным объектом E[gk2] = min. Однако во многих случаях для качественной работы промышленных электроприводов этого недостаточно.
Требуется также
- обеспечить подавление колебаний как в электродвигателе, так и в рабочем органе управляемого объекта;
- обеспечить время регулирования процессов Ω1(t) и Ω2(t) в системе, отвечающее условиям tрег1 ≤ tуст1 и tрег2 ≤ tуст2.
Целью моделирования было исследование влияния на качество управления объектом относительной среднеквадратической ошибки адаптации М и интервала дискретизации сигналов по времени Т. Для этого рассмотрены два варианта сочетания этих параметров.
Вариант 1. Моделирование системы при T = const; М = var
По результатам моделирования составлена таблица 1, отражающая зависимость от заданной относительной ошибки М показателей качества системы: времени регулирования (tрег1 и tрег2), перерегулирования (δ1 и δ2) в обоих каналах, числа колебаний N2 сигнала Ω2(t), а также величины СКО при выбранном из диапазона (6) значении интервала T = 0,004 c.

Из таблицы 1 видно, что при малых значениях М колебания в объекте практически полностью подавляются, но при этом затягиваютcя процессы регулирования в системе. С увеличением показателя М быстродействие и точность системы повышаются до тех пор, пока величина М не станет равной оптимальному для данного объекта значению; при дальнейшем увеличении этого параметра возрастает колебательность процессов и система переходит в неустойчивый режим.
По данным табл. 1 построены графики зависимостей tрег1(M), tрег2(M) и СКО(M), показанные на рисунке 5, из которых видно, что при заданном периоде T = 0,004 с оптимальное значение Мопт ≈ 0,0035.

Некоторые характерные для рассматриваемого случая процессы адаптации в системе при различных значениях М показаны на рисунках 6 и 7.


Вариант 2. Моделирование системы при М = const; T = var
По результатам моделирования составлена таблица 2, которая отражает зависимость показателей качества адаптивной системы от шага дискретизации Т при значении Мопт = 0,0035.

На рисунке 8 показаны графики зависимостей tрег1(T), tрег2(T) и СКО(T).

Характерные процессы в адаптивной системе при различных значениях Т показаны на рисунке 9.

Из приведённых данных видно, что шаг дискретизации сигналов по времени оказывает существенное влияние на свойства системы: при малых значениях Т процессы неустойчивы; увеличение шага дискретизации приводит к уменьшению колебательности и затягиванию переходных процессов.
Анализ характеристик на рисунках 5 и 8 показывает, что частичного или полного выполнения требований, предъявляемых к качеству управления рассматриваемым объектом, можно добиться путём соответствующего выбора отношения параметров M/T*, где T* = T/tуст2 – масштабированное значение шага дискретизации. На рисунке 10 показаны графики зависимости величин СКО и δ2 от соотношений M/T*, которые иллюстрируют это положение.

Заключение
Полученные в работе результаты позволяют сделать следующие выводы:
- метод адаптивного обратного моделирования может успешно применяться в задачах управления упругомассовыми объектами с неопределёнными математическими моделями;
- разработанный способ формализации процедуры синтеза адаптивного регулятора позволяет обеспечить минимизацию среднеквадратической ошибки системы и практически полное подавление колебаний на выходе рабочего органа объекта. Однако, поскольку имитационное моделирование адаптивной системы проводилось только для конкретного вида объектов, данный вывод не может претендовать на общность и его подтверждение требует дальнейших исследований.
Литература
- Борцов Ю.А., Соколовский Г.Г. Автоматизированный электропривод с упругими связями. Санкт-Петербург: Энергоатомиздат, 1992.
- Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. Изд. 4-е, перераб. и доп. СПб: Профессия, 2004.
- Тарарыкин С.В., Копылова Л.Г., Тютиков В.В. Особенности управления состоянием электромеханических систем при ограниченной мощности исполнительных устройств. Мехатроника, автоматизация, управление. 2007. № 6.
- Гудкова Н.В., Чуйков В.М. Синтез упругомассовых cистем управления по желаемой переходной характеристике. Современная электроника. 2011. № 3.
- Уидроу Б., Стирнз С. Адаптивная обработка сигналов. М: Радио и связь, 1989.
- Гудкова Н.В. Цифровое управление техническими объектами с применением адаптивного обратного моделирования. Автоматизация и современные технологии. 2006. № 4.
- Widrow B., Walach E. Adaptive Inverse Control. A Signal Processing Approach, Wiley, Hoboken, NJ, 2008.
- Гудкова Н.В. Приложение принципов адаптивного моделирования к задачам управления динамическими объектами типа «чёрный ящик». Современная электроника. 2012. № 8.
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





