
Особенности судов на воздушной подушке
Суда на воздушной подушке (СВП) обладают рядом неоспоримых преимуществ, к которым, в первую очередь, относятся высокая степень автономности, что позволяет СВП выходить для высадки и приёма пассажиров на необорудованный берег. Этими возможностями широко пользовались речные пассажирские скеговые СВП. Амфибийные СВП также не требуют оборудованных причалов и, что очень важно, позволяют перевозить пассажиров в период ледостава при необходимости по льду. Эти особенности делают амфибийные СВП незаменимыми в ряде районов, например, в период ледостава амфибийные СВП применяют для перевозки пассажиров между г. Благовещенском и Китаем. Создание амфибийных СВП для перевозки 20–60 пассажиров является важной задачей. Пример такого амфибийного СВП приведён на рис. 1 [1].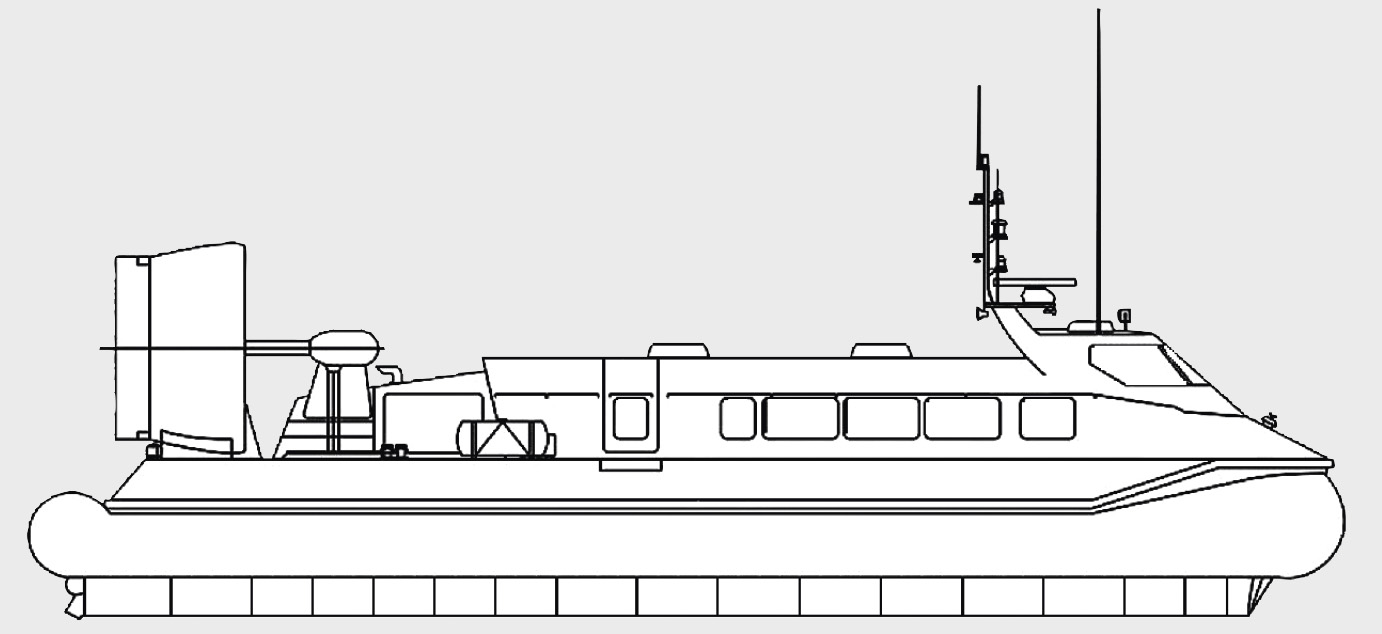
Рис. 1. Боковой вид пассажирского амфибийного СВП-50
Особенности систем управления движением СВП
Для управления СВП требуется система управления техническими средствами (СУТС) и система управления движением (СУД) СВП. Создание подобных систем для СВП является достаточно сложной задачей, определяемой особенностями СВП как объекта управления. Здесь нужно упомянуть, что кроме перечисленных достоинств амфибийное СВП обладает рядом особенностей, которые, скорее, нужно отнести к недостаткам. В частности, амфибийные СВП могут идти с большими углами дрейфа, что может приводить к увеличенным углам крена и дифферента и к подло́му гибкого ограждения [2, 3]. Эти особенности амфибийных СВП требуют, чтобы СУД СВП не только решила задачи ручного управления движением, удержания СВП на заданном курсе или путевом угле, удержания СВП на заданном маршруте, но и обеспечивала предотвращение аварий движения.Основными средствами управления движения амфибийным СВП являются вертикальные аэродинамические рули (ВАР), горизонтальные аэродинамические рули (ГАР), средства управления тягой двигателей (управление оборотами и/или шагом воздушных винтов), управление нагнетателем воздуха (например, управление воздушными заслонками) и струйные рули (СР). Указанные средства управления позволяют обеспечивать стабилизацию курса, движение по заданному маршруту, высокую маневренность и защиту от аварий при движении.
Сложность при проектировании СУД СВП связана с выбором необходимых средств навигации, которые должны функционировать в непростых условиях. Надо учитывать отсутствие у СВП контакта с водой на больших скоростях и высокую стоимость радиодоплеровских лагов. Система измерения положения (GPS/ГЛОНАСС) должна обладать достаточной точностью и высокой частотой измерения, что позволит получить оценки угла дрейфа. Выбор средств измерения углов крена и дифферента и их скоростей изменения также требует тщательной проработки. Наличие средств управления движением и выбор средств измерения параметров движения создают основу для проектирования СУД СВП.
Пример функциональной структуры СУД СВП приведён на рис. 2.
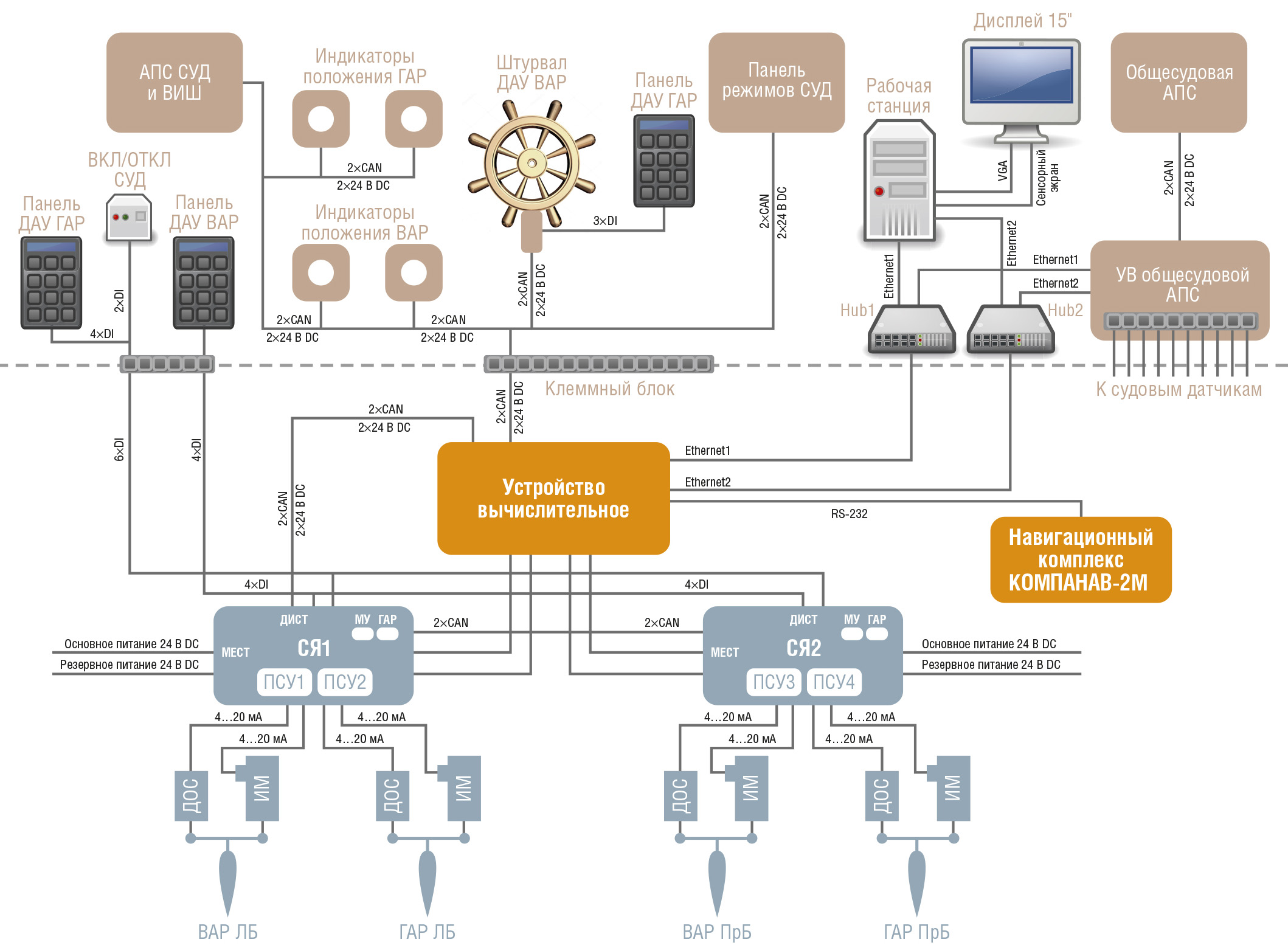
Условные обозначения:
АПС – аварийно-предупредительная сигнализация;
СУД – система управления движением;
ВИШ – винт изменяемого шага;
ВАР – вертикальные аэродинамические рули;
ГАР – горизонтальные аэродинамические рули;
ДУ – дистанционное управление;
УВ – устройство вычислительное;
СЯ – соединительный ящик;
ДОС – датчик обратной связи;
ИМ – исполнительный механизм;
МУ ГАР – местное управление ГАР;
ПСУ – плата следящего управления;
ДАУ – дистанционное автоматизированное управление;
ПрБ – правый борт; ЛБ – левый борт.
Рис. 2. Функциональная структура СУД амфибийного СВП
Рис. 3. Фрагмент принципиальной электрической схемы вычислительного прибора с оборудованием FASTWEL
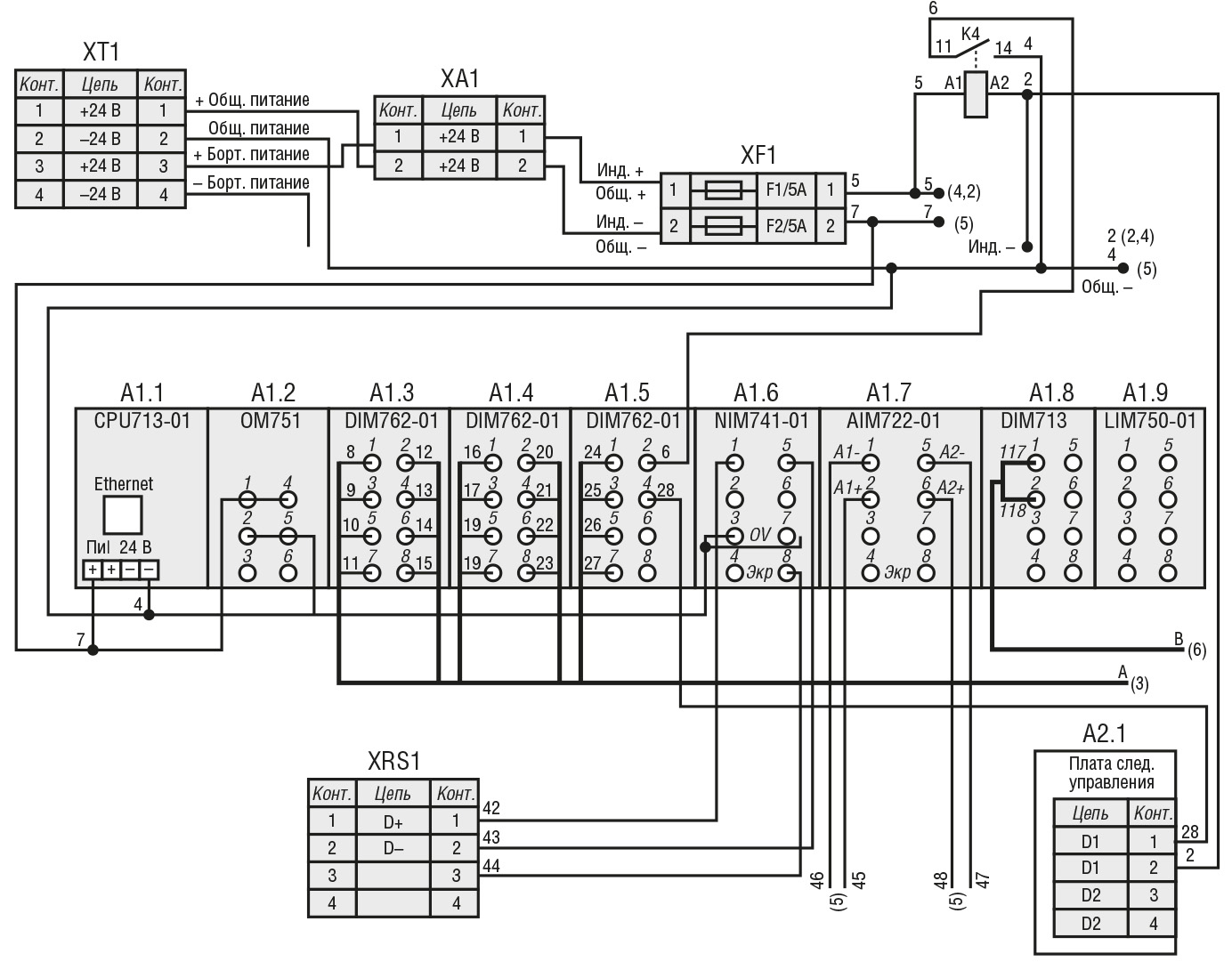
Рис. 3. Фрагмент принципиальной электрической схемы вычислительного прибора с оборудованием FASTWEL
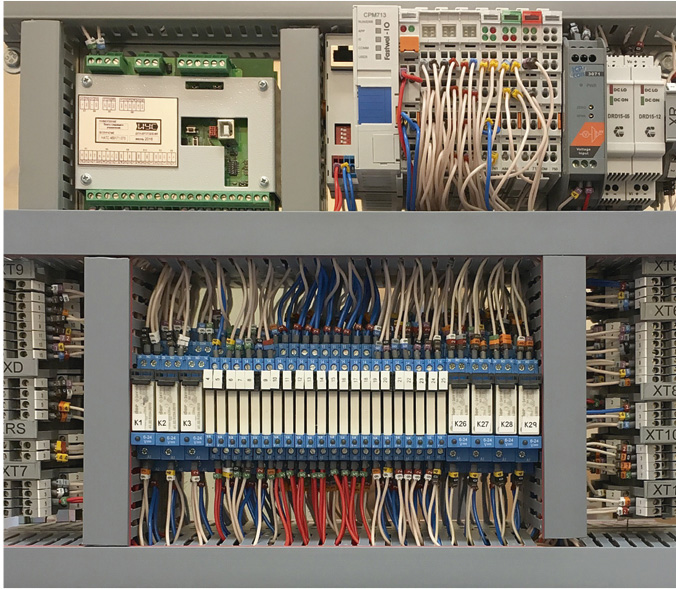
Рис. 4. Устройство вычислительное системы управления движением пассажирского СВП
В качестве исполнительных механизмов (ИМ) в системах управления движением использованы простые электроприводы без встроенной следящей системы управления, поэтому функция управления электроприводами вынесена в отдельное устройство. На рис. 5 приведена плата следящего управления, используемая в СУД СВП.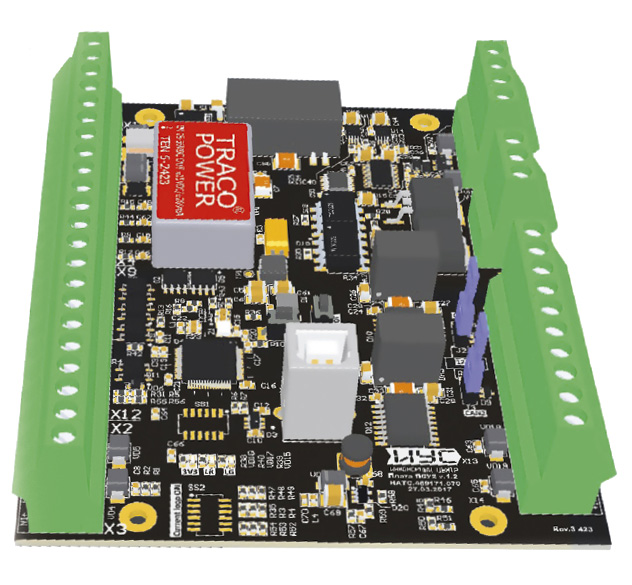
Рис. 5. Плата следящего управления ВАР
Важнейшей частью современных бортовых судовых систем управления является их программное обеспечение (ПО), к которому предъявляются требования надёжности, устойчивости к отказу, возможности модификации. Основой создания ПО компьютеров операторских станций и вычислительных устройств является операционная система. На сегодняшний день наиболее целесообразным выбором являются операционные системы на базе Linux. Пример структуры ПО СУД пассажирского СВП приведён на рис. 6.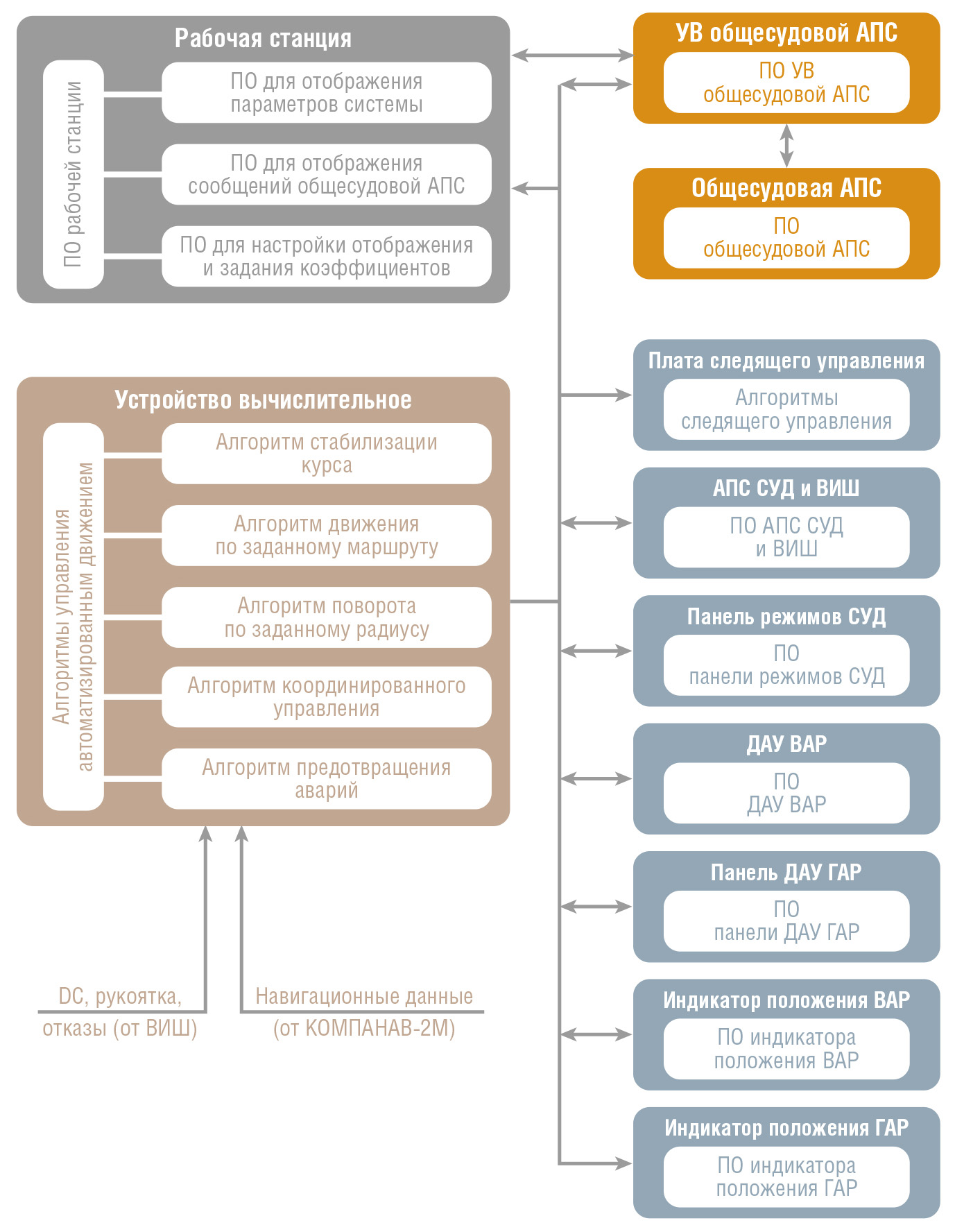
Рис. 6. Структура программного обеспечения СУД
Важной составляющей ПО вычислительного устройства является реализация алгоритмов управления движением СВП, включающая алгоритм управления движением СВП на курсе, алгоритм управления движением СВП по заданным радиусам, алгоритмы координированного управления СВП [4]. Отличие указанных алгоритмов управления движением СВП от аналогичных алгоритмов управления движением водоизмещающих судов определяется значительно большей сложностью СВП как объекта управления по сравнению с водоизмещающими судами. Кроме указанных алгоритмов, вычислительные устройства должны обеспечивать реализацию алгоритмов предотвращения аварий движения СВП [5], что является существенным отличием алгоритмического обеспечения СУД СВП от соответствующего алгоритмического обеспечения систем автоматизированного управления движением водоизмещающих судов. На рис. 7 приведена обобщённая структура алгоритмического обеспечения СУД СВП.
Рис. 7. Информационная структура алгоритмического обеспечения СУД СВП
На рис. 8 приведён пример работы системы предотвращения аварий (СПАВ) движения СВП при выходе угла дифферента и его производной за зону допустимых значений.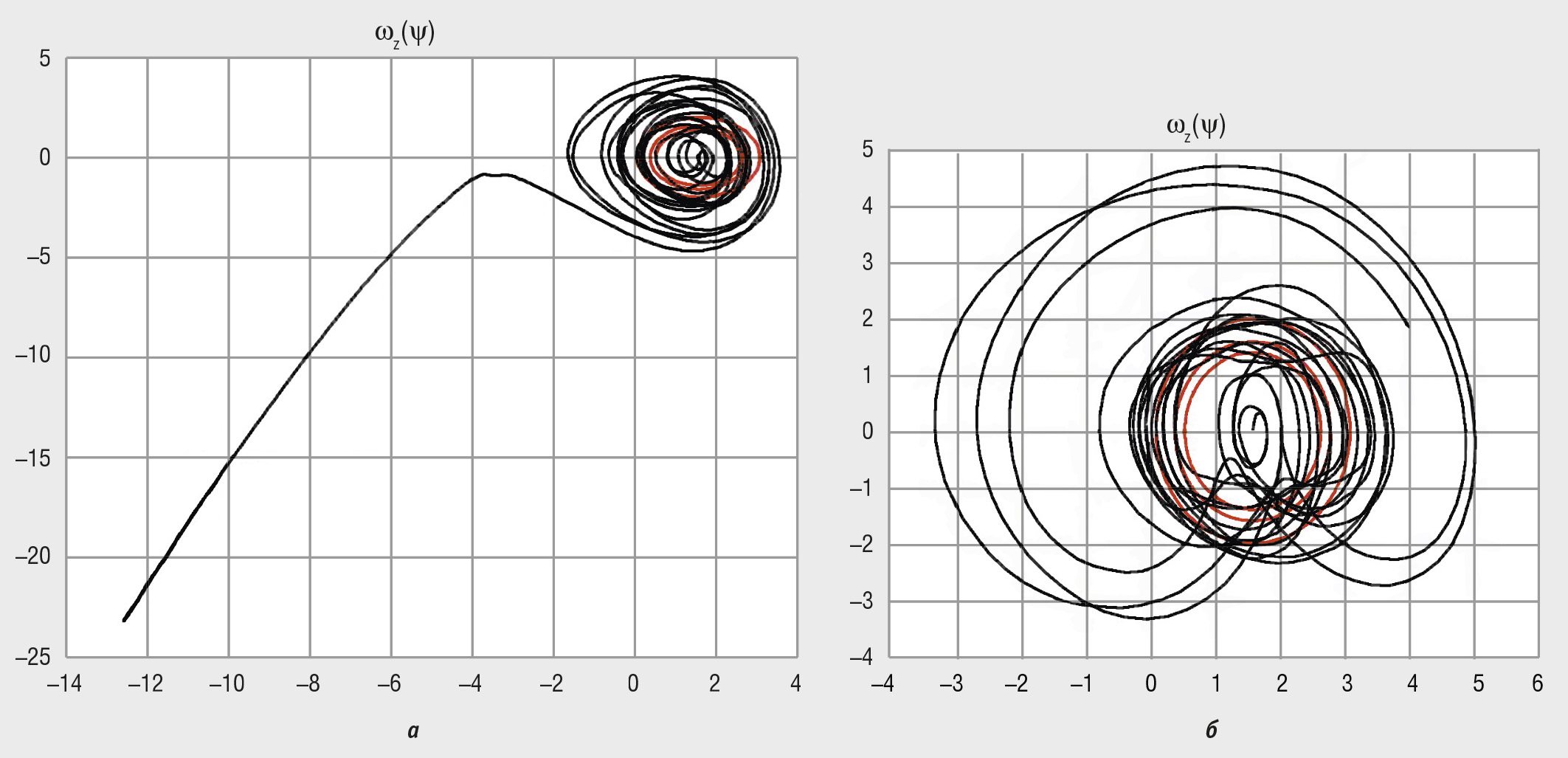
Рис. 8. Пример работы системы предотвращения аварий движения СВП при килевой качке СВП на встречном волнении 4 балла:
а – без СПАВ, б – со СПАВ
Таким образом, при работе СПАВ значение дифферента не становится критическим.
В целом создание СУД СВП является достаточно сложной и ответственной задачей, решение которой обеспечивает качественное и безопасное управление СВП. ●
Литература
- Пассажирское судно на воздушной подушке СВП-50. Проект 12270М // Сайт ОАО «ХСЗ». – Режим доступа : http://aohsz.com/svp-50.html.
- Бенуа Ю.Ю., Дьяченко В.К., Колызаев Б.А. Основы теории судов на воздушной подушке. – Л. : Судостроение, 1970.
- Короткин И.М. Аварии судов на воздушной подушке и подводных крыльях. – Л. : Судостроение, 1981.
- Амбросовский В.М., Коренев А.С., Лукомский Ю.А. Координированное управление морскими подвижными объекта-ми. – СПб : СПбГЭТУ «ЛЭТИ», 2016.
- Амбросовский В.М. Система предупреждения аварий морских подвижных объектов // Морская электроника. – 2013. – № 3(45).
Если вам понравился материал, кликните значок - вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал - не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





