
Введение
Согласно энциклопедии по ультразвуку [1] «звуковизор – это устройство для получения изображения предметов при помощи ультразвуковых волн с использованием акустоэлектронного преобразователя, позволяющего акустическое изображение в форме пространственного распределения звукового давления представить в виде оптического изображения на экране приёмной электронно-лучевой трубки – кинескопа». Данное определение звуковизора, сформулированное 30 лет назад, и сегодня правильно отражает его сущность, однако требует уточнений, позволяющих отличить звуковизор от остальных гидроакустических средств. Прежде всего, современные звуковизоры принципиально отличает высокое пространственное разрешение (не хуже 1° по углу и нескольких сантиметров по дистанции), позволяющее выделить не только отметку в направлении объекта, но и его форму. Следующее отличие касается требования формировать акустическое изображение в режиме реального времени. По этой причине к звуковизорам не следует причислять широко распространённые гидролокаторы бокового обзора и многолучевые эхолоты. Эти устройства хотя и могут быть использованы для построения акустического изображения подводных объектов, но лишь при условии механического перемещения антенны с последующим синтезированием акустического изображения по многим посылкам гидролокационного сигнала. И, конечно, в современных звуковизорах акустическое изображение строится не на экране кинескопа, а на экране монитора компьютера, являющегося неотъемлемой частью звуковизора.
Растущий интерес к звуковизорам обусловлен целым рядом факторов. Во-первых, с расширением масштабов промышленного освоения Мирового океана неизбежно растёт потребность в качественных средствах подводного наблюдения. В настоящее время такие средства востребованы при выполнении подводно-технических и поисково-спасательных работ, при охране судов, морских платформ и других подводных сооружений, для мониторинга состояния гидротехнических сооружений, прокладки трубопроводов по морскому дну, обеспечения навигационной безопасности плавания и т.д. Во-вторых, только звук может распространяться под водой на значительные дистанции. Дальность действия оптических средств наблюдения в воде, как правило, не превышает нескольких метров, а в мутной воде практически сводится к нулю. Следовательно, гидроакустические средства часто могут оказаться единственно возможным средством подводного наблюдения.
Краткий обзор современных звуковизоров
В настоящее время существует достаточно большое разнообразие звуковизоров, отличающихся способом формирования характеристики направленности (ХН) антенны и размерностью сканируемого пространства. Классификация звуковизоров приведена на рис. 1.

По способу формирования ХН различают аналоговые и цифровые звуковизоры, а по размерности сканируемого пространства – двумерные (2D) и трёхмерные (3D). В аналоговых звуковизорах формирование ХН осуществляется с помощью акустической линзы, в цифровых – путём взвешенного суммирования сигналов с отдельных элементов приёмной антенны. В 3D-звуковизоре обзор пространства осуществляется по всем трём координатам. В 2D-звуковизоре пространственное разрешение обеспечивается либо только по двум угловым координатам (УУ-звуковизор), либо по одному углу и дистанции (УД-звуковизор).
В течение длительного времени развитие звуковизоров шло по линии совершенствования аналоговых двумерных устройств, использующих для формирования лучей акустическую линзу [2]. В таких звуковизорах ультразвуковой прожектор облучает («подсвечивает») наблюдаемый подводный объект. Отражённые ультразвуковые волны с помощью акустической линзы фокусируются на матрицу пьезоэлементов, сопряжённую с передней поверхностью специальной электронно-лучевой трубки. Электронный луч считывает с матрицы электрический потенциал, который, в свою очередь, детектируется, оцифровывается и отображается на мониторе персонального компьютера в виде пространственного распределения яркости (цвета). В этом классе наиболее совершенным, возможно, является звуковизор, созданный совместно Акустическим институтом и научно-производственным объединением «АКМА». Он обладает следующими характеристиками:
-
рабочая частота 1 МГц;
-
ширина сектора обзора 30°×30°;
-
угловое разрешение 0,9°×0,9°;
-
предельная дальность действия 30 м;
-
вес в воздухе 15 кгс;
-
размеры 42×42×55 см.
К недостаткам такого звуковизора следует отнести значительные габариты, обусловленные акустической линзой и электронно-лучевой трубкой. Кроме того, этот звуковизор имеет ограниченное угловое разрешение (порядка 30 точек в каждом направлении) и вовсе не имеет разрешения по дистанции. Следовательно, он не позволяет определять дистанцию до объекта и реконструировать его форму.
Существенное улучшение качества освещения подводной обстановки может быть достигнуто при использовании современных цифровых технологий для формирования пространственной избирательности. Преимущества использования цифровой технологии связаны прежде всего с её методологической гибкостью, которая при высоком быстродействии современных сигнальных процессоров позволяет повысить угловое разрешение, помехоустойчивость и дальность действия за счёт увеличения числа элементов приёмной антенны и использования длинных широкополосных сигналов. При формировании трёхмерной избирательности появляется возможность воспроизводить не только акустическую освещённость поверхности объекта, но и его форму. Однако современный уровень развития сигнальных процессоров ещё не позволяет формировать достаточное число узконаправленных лучей при использовании полностью заполненной двумерной антенны. Так, приёмная антенна 3D-звуковизора EchoScope 1600 норвежской фирмы OmniTech состоит из 40×40 элементов. Соответственно, реальное разрешение по каждому углу не превышает 40 лучей. Правда, цифровые методы формирования лучей позволяют при изменении рабочей частоты распределять эти 40 лучей в разныe по ширине сектора обзора. Предусмотрены 3 рабочие частоты: 150, 300 и 600 кГц. Этим частотам соответствуют сектора углов обзора 90°×90°, 50°×50° и 25°×25° и значения разрешающей способности по углу 2,5°, 1,3° и 0,6°. Предельная дальность действия этой камеры равна 100 м. Скорость обновления изображения составляет 5–10 кадров в секунду. Основным недостатком данного звуковизора следует признать невысокое качество изображения из-за ограниченной разрешающей способности по углам. Можно предположить, что повышение разрешающей способности за счёт увеличения числа элементов сдерживается резким усложнением задач оцифровки сигналов с приёмных элементов антенны и формирования двумерной ХН. Весьма значительны габариты (60×40×20 см) и вес (55 кгс) приёмно-излучающего модуля, а также стоимость этого изделия.
Задача оцифровки входных сигналов и формирования большого числа лучей существенно упрощается при использовании прореженных антенн. Однако при неплотном заполнении поверхности антенны существенно возрастают боковые лепестки ХН антенны. Так, при расположении элементов антенны вдоль окружности уровень первого бокового лепестка характеристики направленности, описываемой функцией Бесселя нулевого порядка, составляет 40% [3]. Размещение на плоскости 128 приёмных элементов вдоль 16 закручивающихся спиралей позволяет ограничить уровень боковых лепестков величиной 20% при ширине ХН порядка 1° в обоих направлениях [4]. Однако из-за того что такой уровень бокового поля сохраняется во всём полупространстве, суммарный уровень сигнала, проникающего через боковое поле, существенно превышает уровень полезного сигнала, поступающего через основной лепесток ХН антенны, что не позволяет использовать такую антенну для качественного воспроизведения акустического изображения звукорассеивающего объекта. Поэтому гидролокаторы с прореженной антенной практически могут использоваться лишь для обнаружения и определения координат одиночных объектов.
Компромиссное соотношение между качеством акустического изображения и числом элементов антенны достигается при использовании крестообразной антенны (креста Миллса), одна из линеек которой является приёмной, а другая – излучающей. Результирующая ХН такой приёмно-излучающей антенны в точности совпадает с ХН полностью заполненной плоской приёмной антенны, то есть при использовании такой антенны качество изображения будет соответствовать качеству изображения, получаемого при использовании двумерной, полностью заполненной антенны. Однако благодаря неизмеримо меньшему числу элементов задача оцифровки входных сигналов и формирования ХН существенно упрощается. Следовательно, волновые размеры антенны и соответственно её угловое разрешение можно существенно увеличить, а стоимость уменьшить.
Именно такой принцип был использован при создании 3D-звуковизора в Акустическом институте [5]. Его основные характеристики: рабочая частота 200 кГц; ширина сектора обзора 90°×90°; угловое разрешение 1,1°×1,1°; дальность действия 200 м; разрешение по дистанции 5 см; габариты 50×40×30 см; вес в воздухе 20 кгс. В качестве недостатка следует отметить его достаточно значительные весогабаритные характеристики. Кроме того, последовательный характер облучения приводит к значительному возрастанию времени формирования кадра из-за достаточно длительного времени приёма эхо-сигнала с каждого облучаемого направления. Также весьма высоки требования и к вычислительным ресурсам из-за необходимости формирования большого числа пространственных каналов – не менее 64×64 только в угловых направлениях. Это неизбежно приводит к возрастанию потребляемой мощности, весогабаритных характеристик и стоимости звуковизора в целом.
Весогабаритные характеристики звуковизора принципиально могут быть снижены при увеличении рабочей частоты за счёт уменьшения размеров антенны. Второй образец 3D-звуковизора, изготовленный в Акустическом институте, при рабочей частоте 1 МГц имеет на порядок меньший вес. Неизбежное снижение с увеличением рабочей частоты дальности действия компенсируется уменьшением времени формирования кадра благодаря уменьшению времени распространения звука до границ просматриваемой области.
Весогабаритные характеристики и стоимость звуковизора существенно снижаются также при обзоре пространства лишь по двум координатам: по одному углу и по дистанции (УД-звуковизор). Ширина сектора обзора составляет при этом обычно 30°…45° при ширине отдельного луча 0,3°…1° в направлении сканируемого угла. Ширина луча по ортогональному углу составляет порядка 15°…20°. Такой звуковизор при наклонном облучении идеально подходит для поиска и распознавания объектов, находящихся на дне или на любой протяженной поверхности, в том числе и на поверхности воды при облучении из подводного положения. Благодаря облучению под малым углом осуществляется обзор достаточно большого участка поверхности, ограниченного лишь дальностью действия прибора, которая в свою очередь ограничена затуханием сигнала в воде. При нахождении объекта на рассеивающей поверхности или вблизи неё его изображение сопровождается изображением тени, форма которой и удаление от изображения объекта предоставляют дополнительную информацию для распознавания и определения координат объекта.
К несомненным достоинствам УД-звуковизора следует также отнести принципиально более высокую скорость формирования кадров, поскольку для этого достаточно всего одной посылки зондирующего сигнала. Благодаря перечисленным достоинствам УД-звуковизоры нашли весьма широкое применение за рубежом. Наибольшее распространение получили звуковизоры фирмы Blue View Technologies и акустическая камера DIDSON производства Sound Metrics Corp. Экспериментальный образец цифрового 2D-звуковизора был изготовлен и в Акустическом институте (АКИН).
Основные характеристики современных звуковизоров сведены в табл. 1.

* В зависимости от шкалы дистанций.
** При использовании дополнительного оборудования.
*** При питании камеры от дополнительного подводного источника.
Экспериментальные образцы звуковизоров Акустического института
Двумерный звуковизор
Внешний вид подводного модуля цифрового 2D-звуковизора представлен на рис. 2.

Модуль включает блок антенны из 48 расположенных вдоль дуги пьезоэлементов, блок электроники и подводный кабель связи с надводным модулем. Блок-схема звуковизора представлена на рис. 3.

Условные обозначения: ПУ – приёмный усилитель; УМ – усилитель мощности; БУ – блок управления; БП-П – блок питания подводного модуля; БП-Н – блок питания надводного модуля; ПК – переносимый компьютер.
Блок электроники включает две 24-канальные платы приёмных усилителей (ПУ), две платы усилителей мощности (УМ), подключаемых к пьезоэлементам по мостовой схеме, две 24-канальные платы АЦП, блок питания (БП-П) и блок управления (БУ). Блок управления служит для формирования излучаемых сигналов, управления коэффициентом усиления ПУ, в том числе в течение времени приёма, формирования управляющих сигналов АЦП, приёма оцифрованных сигналов с выхода АЦП, последующей цифровой фильтрации, децимации и передачи по линии Ethernet в надводный модуль звуковизора. Блок управления построен на базе отладочного мини-модуля DS-KIT-FX12MM1-G, использующего ПЛИС Xilinx серии Virtex-4 FX12.
Надводный модуль включает в свой состав источник постоянного тока (БП-Н) для питания подводного модуля и переносимый компьютер (ПК), выполняющий всю необходимую обработку сигналов с элементов антенны с целью формирования акустического изображения и его графического отображения. Для связи надводного модуля с подводным используется кабель КВПЭфМ (НПП «Спецкабель»), состоящий из четырёх витых пар, две пары из которых используются для передачи сигналов через интерфейс Ethernet, а две другие – для подвода питания. Напряжение питания должно быть не менее 24 В при длине кабеля 50 м и 36 В при длине 100 м.
В настоящее время в АО НИИ «RIF-ACVAAPARAT» (г. Бельцы) освоен серийный выпуск описанного звуковизора, получившего название «Нептун». В качестве компьютера в нём используется защищённый ноутбук Getac M230N-4, обладающий достаточными вычислительными ресурсами для обработки сигналов в реальном масштабе времени.
 и акустическое (б) изображения куба")
Рис. 4 иллюстрирует воспроизведение звуковизором изображения куба, выполненного из металлических ребер длиной 50 см и диаметром 8 мм, обмотанных верёвкой. Слева приводится оптическое изображение куба (а), справа – акустическое (б). Акустическое изображение в центре рис. 4 б однозначно идентифицируется с кубом. Правильно отображаются размеры куба и его положение в бассейне. Кроме куба, звуковизор адекватно воспроизводит положение и ориентацию противоположной стенки бассейна, а также звукопоглощающих (в звуковом диапазоне частот) понтонов на его поверхности и погружённых в воду посторонних объектов.
Трёхмерный звуковизор
Для отладки алгоритмов формирования трёхмерного акустического изображения подводных объектов и его воспроизведения на двумерном экране монитора был создан экспериментальный стенд на основе таких изделий фирмы Advantech, как шасси IPC-610, одноплатный промышленный компьютер PCA-6178 и объединительная панель PCA-6114P10, с использованием двух 32-канальных плат АЦП ADM214x10MX и двух 32-канальных плат ЦАП ADMDAC3224x192. Таким образом, стенд имеет по 64 аналоговых входа и выхода. К аналоговым входам подключаются выходы усилителей сигналов с элементов приёмной антенны, а аналоговые выходы стенда соединены со входами усилителей мощности излучаемых сигналов. Внешний вид используемой антенны показан на рис. 5.

Она имеет приёмную и излучающую антенны, которые линейны, содержат по 64 пьезоэлемента каждая и закреплены ортогонально относительно друг друга. Усилители сигналов размещены в корпусах антенн в непосредственной близости к пьезоэлементам. Резонансная частота пьезоэлементов равна 200 кГц.
Ресурсы компьютера PCA-6178 позволяют выполнять все необходимые функции формирования сигналов, приёма оцифрованных сигналов, их обработки и графического отображения на экране монитора. Одна из задач, решаемых с помощью стенда, заключалась в отработке алгоритмов отображения данных, формируемых 3D-звуковизором. Для этого в программном обеспечении было реализовано несколько алгоритмов визуализации трёхмерной информации:
-
последовательное изменение одной из координат (либо угла облучения, либо угла приёма, либо дистанции) и представление распределения сигнала по двум оставшимся координатам;
-
проекция объёмного распределения уровня акустического излучения на произвольную плоскость (вращение этой плоскости вокруг также произвольной оси создаёт на экране монитора ощущение объёмного изображения);
-
оценка для каждого луча, положение которого определяется двумя углами, дистанции с максимальным уровнем сигнала (совокупность таких точек для всех сочетаний углов образует поверхность, которая может быть изображена на экране монитора; этот вариант отображения более всего подходит для воспроизведения формы протяжённых объектов, например рельефа дна).
Примеры воспроизведения акустического изображения подводного пространства в бассейне Акустического института представлены на рис. 6.
, угла приёма (б) и двух значений дистанции (в, г)")
Здесь представлены оценки распределения уровня акустического сигнала по двум координатам при фиксировании угла облучения (а), угла приёма (б) и двух значений дистанции (в, г). На приведённых изображениях отчётливо отображаются стенки, дно и участки поверхности бассейна, покрытые звукопоглощающими понтонами. Корректно отображаются лестница длиной 3 м, спущенная с понтона (на дистанции около 11 м), и металлическая сетка (на дистанции 5 м).
Металлическая сетка, фотография которой в надводном положении представлена на рис. 7, использовалась для имитации протяжённой звукорассеивающей поверхности. На рис. 7 также видна приёмно-излучающая антенна, кабели от которой подключены к экспериментальному стенду обработки сигналов.
 и звукорассеивающая поверхность (2)")
На рис. 8 представлены два варианта воспроизведения изображения сетки: по амплитуде эхо-сигнала (а) и по оценке времени его прихода с каждого углового направления (б).
 и по времени прихода эхо-сигнала (б)")
Внешний вид подводного модуля трёхмерного звуковизора, изготовленного в Акустическом институте, представлен на рис. 9.

Его основу составляют две перпендикулярно расположенные 64-элементные линейные антенны, используемые в экспериментальном стенде. Для формирования излучаемых сигналов, оцифровки, фильтрации и передачи на надводный модуль принимаемых сигналов используется система, полностью собранная на базе 5-слотовой объединительной панели Advantech РСА-6105 из готовых модулей: одноплатного промышленного компьютера Advantech PCI-6872, а также двух пар упоминавшихся ранее 32-канальных плат АЦП и ЦАП.
Использование готовых модулей существенно сокращает время сборки системы, однако приводит к значительному росту энергопотребления, габаритов, а также стоимости вследствие избыточности ресурсов, заложенных в её модули. При серийном выпуске звуковизора следует использовать оригинальные платы, не обладающие избыточностью, но более выигрышные по совокупности технических характеристик. Именно по такой схеме был реализован описанный ранее 2D-звуковизор. По этой же схеме был изготовлен и малогабаритный 3D-звуковизор с рабочей частотой 1 МГц. Его внешний вид показан на рис. 10. В качестве надводного модуля обработки и отображения здесь используется защищённый ноутбук Panasonic CF-52, обладающий всеми необходимыми ресурсами.
")
Направления дальнейшего развития звуковизоров
Логично предположить, что дальнейшее развитие звуковизора пойдёт по пути повышения качества акустического изображения и дальности действия. Вполне очевидным желанием является также минимизация весогабаритных характеристик звуковизора. Перечисленные характеристики звуковизора зависят от его рабочей частоты. Для уменьшения весогабаритных характеристик антенн при одновременном сохранении углового разрешения следует максимально увеличивать рабочую частоту. Увеличение частоты позволяет также увеличить и ширину полосы частот излучаемого сигнала и, следовательно, повысить разрешение по дистанции. Кроме того, с увеличением рабочей частоты уменьшается расстояние до границы зоны Френеля и, следовательно, сокращается размер области, в которой необходимо предусматривать дополнительную процедуру фокусировки антенны, что, в конечном итоге, упрощает пространственную обработку сигналов как излучающей, так и приёмной антенны. Единственным фактором, сдерживающим повышение рабочей частоты, является ограничение дальности действия из-за увеличения потерь на поглощение звука.
Для оценки зависимости дальности действия от частоты вычислим величину отношения сигнал/помеха в отдельном пространственном канале звуковизора, в котором наблюдается фрагмент звукорассеивающей поверхности подводного объекта. Под сигналом будем понимать мощность акустического излучения, рассеянного элементарной разрешаемой площадкой на поверхности наблюдаемого объекта. В качестве помехи рассматриваются главным образом шумы усилителей сигналов с элементов приёмной антенны. Несложные выкладки показывают, что в этом случае зависимость дальности действия от частоты зондирующего сигнала для 3D-звуковизора определяется соотношением:
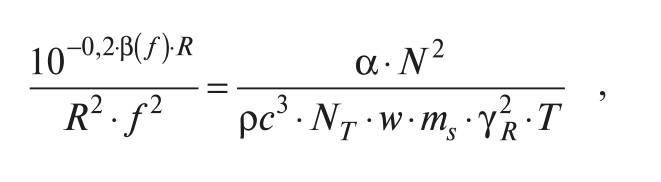
где f – частота зондирующего сигнала; R – расстояние до звукорассеивающей поверхности; β(f) – частотная зависимость коэффициента поглощения звука в воде; α – пороговое значение отношения сигнал/помеха, характеризующее качество акустического изображения; N – спектральная плотность мощности суммарной помехи, приведённой к выходу элементов приёмной антенны; ρ – плотность воды; c – скорость звука в воде; NT – число элементов излучающей антенны; w – плотность мощности излучения на активной поверхности излучателей; ms – коэффициент обратного рассеивания звука от поверхности; γR – чувствительность отдельного элемента приёмной антенны; T – длительность зондирующего сигнала.
Частотная зависимость левой части приведённого выражения имеет вид монотонно убывающей функции как частоты f, так и расстояния R. Следовательно, чем меньше значение выражения справа, которое для удобства определим как коэффициент А, тем больше может быть рабочая частота или дальность действия. При заданных характеристиках среды распространения звука и облучаемого объекта (параметры ρ, с, w, ms) уменьшение величины коэффициента А может достигаться за счёт уменьшения уровня помехи, повышения чувствительности пьезоэлектрических преобразователей, увеличения числа элементов излучающей антенны и увеличения длительности зондирующего сигнала. Каждая из перечисленных величин имеет свой предел. Спектральная плотность шумов малошумных усилителей составляет 10–8…10–9 В/√Гц. Максимальная чувствительность пьезоэлектрических преобразователей к давлению достигает сотен мкВ/Па, докавитационная плотность излучения – порядка 1 Вт/см2. Число элементов излучающей антенны сопоставимо с числом разрешаемых углов. Длительность зондирующего сигнала ограничена временем его распространения от излучателя до объекта и обратно.
Оценим количественно зависимость оптимальной частоты от расстояния до объекта при следующих значениях исходных данных: α = 100, N = 10–8 В/√Гц, ρ = 1000 кг/м3, c = 1500 м/с, NT = 100, w = 10 000 Вт/м2, ms = 10–4, γR = 10–4 В/Па, T = 0,01 с. Эти данные следует рассматривать как близкие к предельным, для них значение коэффициента А равно 3×10–19. При заданном значении коэффициента А и известной частотной зависимости коэффициента поглощения звука в воде можно представить наибольшее значение рабочей частоты звуковизора как функцию от его предельной дальности действия. Оценки этой частоты для трёх значений коэффициента А и разных дистанций, вычисленные с использованием приближения Торпа [6] для частотной зависимости коэффициента поглощения звука, представлены в табл. 2.
")
Приблизительно такое же соотношение между дальностью действия и оптимальной частотой получается для 2D-звуковизора.
Между оптимальной частотой и длиной антенны существует простая связь, а именно: длина антенны равняется длине звуковой волны λ, делённой на требуемое угловое разрешение. При угловом разрешении 1° длина антенны приблизительно составляет 50 λ [3]. На частоте 500 кГц она составит 15 см, а на частоте 50 кГц размер антенны возрастает до 1,5 м.
Заключение
Современные тенденции построения звуковизора заключаются в следующем:
-
наибольшее развитие получили двумерные звуковизоры, формирующие акустическое изображение в координатах угол – дистанция; для них в настоящее время соотношение качества изображения, времени формирования кадра, стоимости и весогабаритных характеристик представляется наиболее близким к оптимальному;
-
перспективы построения трёхмерного звуковизора связаны с использованием двух ортогонально располагаемых линейных антенн (излучающей и приёмной) и цифровой обработки сигналов;
-
цифровые звуковизоры имеют значительный модернизационный потенциал, позволяющий варьировать в широком диапазоне их дальность действия и оптимизировать технические характеристики в зависимости от области применения. ●
Литература
-
Ультразвук. Маленькая энциклопедия / под ред. И.П. Голяминой. – М. : Советская энциклопедия, 1979.
-
Системы акустического изображения / под ред. Г. Уэйда. – Л. : Судостроение, 1981.
-
Справочник по гидроакустике / под ред. А.Е. Колесникова. – Л. : Судостроение, 1982.
-
Benjamin K.C. The development of a very large, dense packed, two-dimensional, ultrasonic imaging array // Acoustical Imaging. – 1997. – Vol. 23. – Рp. 477–483.
-
Лекомцев В.М., Титаренко Д.В., Швед А.П. Цифровой звуковизор для реконструкции трёхмерного изображения подводных объектов // Сб. трудов XVIII сессии РАО. – М. : ГЕОС, 2006. – Т. 2. – С. 82–85.
-
Урик Р. Дж. Основы гидроакустики : пер. с англ. – Л. : Судостроение, 1978.
E-mail: vlekomtsev@yandex.ru
Если вам понравился материал, кликните значок - вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал - не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





