 к EtherCAT")
Введение
Промышленные шины стали неотъемлемым компонентом в системах автоматизации производства и, пройдя проверку временем, нашли широкое применение в различных отраслях промышленности. Именно использование промышленных шин способствовало расширению сферы применения систем управления на основе персонального компьютера. Однако стремительный рост производительности управляющих устройств, особенно устройств на базе промышленных компьютеров, произошедший в последнее время, привёл к тому, что традиционные промышленные шины стали «узким местом» систем. Дополнительным фактором, уменьшающим производительность, является многоуровневая архитектура управления, состоящая из нескольких подчинённых систем (обычно циклических): текущего управляющего задания, полевой шины и, возможно, локальных шин расширения в системах ввода-вывода или собственного цикла микропрограммы периферийного устройства. В результате время реакции системы может превышать управляющий цикл в 3-5 раз, что уже неприемлемо на сегодняшний день. Поэтому основные игроки на рынке (как организации по разработке полевых шин, так и крупные компании, занимающиеся автоматизацией) выбрали Ethernet в качестве расширения или замены в будущем патентованной технологии полевой шины и разработали требуемые для этого стандарты. Ethernet был разработан для передачи данных в локальных вычислительных сетях, поэтому использование данной технологии в системах управления приводами двигателей и устройствами ввода-вывода, то есть в областях, где доминирующее положение занимают традиционные промышленные шины, стало относительным новшеством. Основными требованиями к Ethernet в этом случае являются высокие показатели работы в режиме реального времени, оптимизация с целью передачи данных небольшими порциями, а также снижение экономических затрат при внедрении.
Ethernet и режим реального времени
Существует несколько способов обеспечить режим реального времени в Ethernet-технологиях. Например, отключение процедуры множественного доступа к общей передающей среде с контролем коллизий (CSMA/CD) на более высоких уровнях протокола и замена её на процедуру последовательного опроса (polling) либо использование специальных аппаратных коммутаторов, которые распределяют Ethernet-пакеты в строго определённой временно'й последовательности. Несмотря на то что такие решения способны в той или иной степени обеспечить быструю и точную транспортировку пакетов данных к устройствам по сети Ethernet, время, необходимое на коммутацию, а также на чтение входных данных, в значительной мере зависит от конкретной реализации.
«Классический» Ethernet, где каждому устройству данные передаются отдельными Ethernet-пакетами, обеспечивает низкую скорость обмена полезными данными, так как минимальный размер Ethernet-пакета с межпакетным интервалом составляет 84 байта. Поэтому, когда устройство циклически посылает 4 байта текущих показателей и статусных данных и соответственно получает 4 байта управляющих команд при 100-процентной загруженности шины (то есть с очень коротким временем отклика двигателя), доля полезных данных составляет не более 4,8%. При среднем значении времени отклика в 10 мкс скорость передачи полезных данных падает до 1,9%. Эти ограничения характерны для всех Ethernet-технологий реального времени, которые построены на принципе передачи отдельных Ethernet-пакетов каждому устройству, вне зависимости от используемых при передаче Ethernet-пакета протоколов.
Принципы функционирования Ethercat
Технология EtherCAT снимает ограничения, свойственные другим технологиям, в которых Ethernet-пакет принимается, затем интерпретируется, обрабатывается и пересылается на отдельное устройство. EtherCAT-модули на лету считывают адресованные им данные и записывают ответные, то есть это происходит во время прохождения пакета через модуль ввода-вывода (рис. 1).
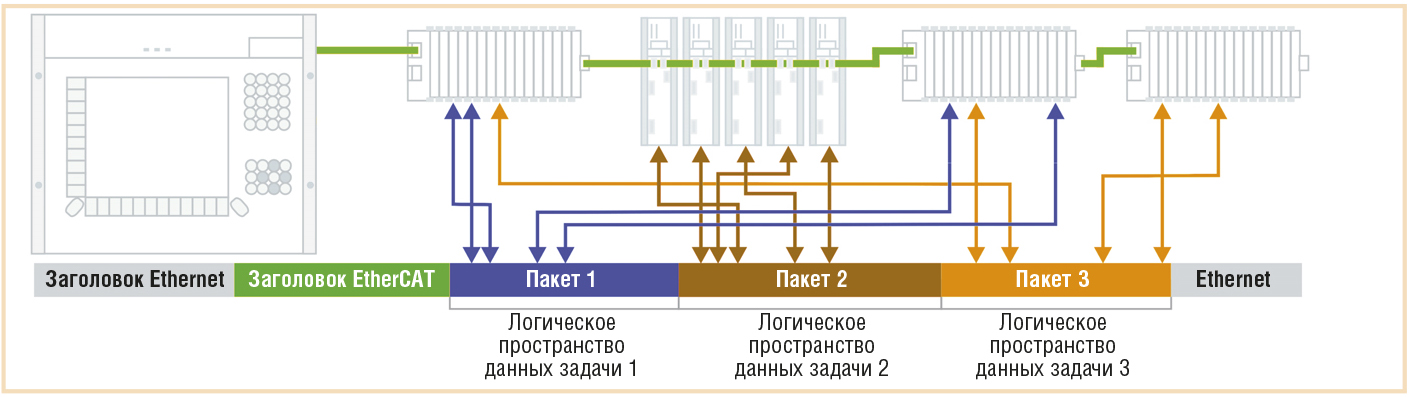
При этом время задержки пакета на модуле составляет всего несколько наносекунд. Пакет, отправленный мастером, проходит через все устройства, пока не достигнет конца сегмента или ответвления. На последнем устройстве определяется открытый порт, поэтому пакет отсылается обратно.
Поскольку Ethernet-пакет содержит данные ввода-вывода многих устройств, КПД использования канала связи возрастает до 90%. При этом используются возможности высокоскоростной полнодуплексной передачи данных по стандарту 100Base-TX. Таким образом может быть достигнута высокая скорость обмена данными, составляющая более 100 мегабит в секунду (2´100 Мбит/с при КПД использования канала порядка 90%). Но что дают все эти особенности EtherCAT, и какова выгода конечного пользователя? Рассмотрим это подробнее.
Высокая эффективность
EtherCAT превосходит по скорости классические системы полевых шин и является одной из самых быстрых технологий среди решений, основанных на промышленном Ethernet. Типовое время цикла для EtherCAT составляет от 50 до 250 мкс, в то время как у классических полевых шин время обновления занимает от 5 до 15 мс. Поэтому решение на базе EtherCAT может более полно использовать вычислительную мощность промышленного компьютера, а возросшая скорость управляющей части обеспечивает повышенную точность результатов. Более скоростная сеть позволяет уменьшить время ожидания, тем самым увеличивая производительность линии или всего цеха, что приводит к определённому росту эффективности. Так, один из ведущих производителей оборудования для литья пластмассы под давлением сообщает, что применение EtherCAT позволило им уменьшить колебание веса деталей и тем самым уменьшить отклонения в толщине стенок пластмассовых изделий, что дало экономию материалов в 180 000 долларов США в год на каждой линии.
Точность синхронизации
EtherCAT не только быстрая, но и точная технология, что достигается при помощи системы глобального времени (distributed clock), которая обеспечивает выборку значений времени по принципу синхронизации во всей сети со сдвигом значительно меньшим, чем 1 мкс (рис. 2). В большинстве случаев отклонение составляет меньше 100 нс. Такая точность необходима для решений с синхронизированным управлением перемещением или для измерительных задач.

Экономическая эффективность технологии
Низкая стоимость EtherCAT обеспечивается, с одной стороны, программной реализацией EtherCAT-мастера и использованием стандартного Ethernet-порта на стороне промышленного компьютера, а с другой стороны – относительной дешевизной интегрированных контроллеров подчинённых модулей (slaves). Использование стандартных Ethernet-кабелей и Ethernet-разъёмов, а также отсутствие требований к применению коммутаторов или активных компонентов сети для коммутации позволяют снизить расходы на монтаж и эксплуатацию. Также сокращаются затраты на инжиниринг, поскольку сеть не требует тонких настроек, а диагностические возможности технологии обеспечивают точную локализацию ошибки и сокращение времени на устранение неполадок.
Кроме констатации низких цен на чипы и аппаратную часть, следует отметить такие важнейшие факторы, влияющие на их дальнейшее снижение, как всемирное признание технологии EtherCAT, широкий ассортимент соответствующей продукции и конкуренция между её производителями. Технология EtherCAT продвигается организацией EtherCAT Technology Group (ETG), которая насчитывает более 1000 компаний-участниц из 47 стран. EtherCAT – это быстро адаптируемая технология на базе промышленного Ethernet: каталог изделий на сайте ETG уже насчитывает более 500 наименований, разнесённых по более чем 200 категориям, и, кроме того, в самое ближайшее время ожидается появление на рынке множества новинок.
Гибкость и возможность миграции
Сеть на основе EtherCAT практически не имеет ограничений по топологии: линия, звезда, дерево, кольцо с резервированием и другие типы – до 65 535 узлов в сегменте. Если расстояние между узлами превышает 100 метров, применяется оптоволокно. Также возможно интегрировать беспроводные технологии. Функция «горячего» подключения (hot connect) позволяет подключать/отключать узлы во время работы.
В сети EtherCAT не требуется выставлять адреса вручную на каждом устройстве при помощи переключателей, на старте системы адреса назначаются автоматически. Даже если устройство добавляется позднее, начальные адреса не меняются. В мастере EtherCAT возможно реализовать функцию автоматического распознавания сети и сравнение существующей конфигурации с ожидаемой при помощи специальной программы. После замены устройства все параметры могут быть загружены автоматически.
В EtherCAT можно легко интегрировать классические системы полевой шины. На данный момент уже поддерживаются 19 различных систем. Среди них есть такие как PROFIBUS-DP, CAN, CANopen, DeviceNet. Это позволяет интегрировать уже имеющиеся устройства в сеть EtherCAT и реализовывать интерфейсы в смежные системы или системы верхнего уровня. Процедура миграции с предыдущих систем облегчена, но в то же время удалось избежать усложнения интерфейсов центральных процессоров: другие системы интегрируются через EtherCAT, а не через PCI, cPCI, PCIe и т.д.
Безопасность
Обычно функции противоаварийной защиты (ПАЗ) реализуются отдельно от сети автоматизации либо посредством аппаратной части, либо через выделенную системную шину. Протокол ПАЗ (SFoE – Safety over EtherCAT) позволяет реализовать коммуникацию ПАЗ и управляющую коммуникацию в единой сети. Протокол ПАЗ реализован на уровне приложения EtherCAT и не оказывает негативного воздействия на нижние уровни. Протокол сертифицирован по IEC 61508 и соответствует требованиям уровня безопасности SIL 3.
Открытость технологии
Как декларируется, практически все системы полевых шин и Ethernet-технологий являются открытыми. В технологии EtherCAT открытость означает международную стандартизацию (IEC, ISO) с открытыми спецификациями для членов ETG, доступность коммерческих и условно-бесплатных программных пакетов с открытым кодом для мастера и подчинённых устройств.
Технология EtherCAT не только полностью совместима с Ethernet, но также характеризуется конструкционной открытостью протокола для транспортировки прочих служб и протоколов на базе Ethernet (в том числе протоколов Internet) по единой физической сети. Эти Internet-технологии туннелируются через протокол EtherCAT; таким образом, характеристики реального времени не затрагиваются. Поэтому все Internet-технологии могут использоваться в среде EtherCAT: интегрированные Web-серверы, электронная почта, передача данных по FTP и т.д.
Универсальность
Технология EtherCAT является универсальной в использовании: поддерживаются коммуникации «мастер–подчинённый» (master-to-slave), «подчинённый– подчинённый» (slave-to-slave) и «мастер–мастер» (master-to-master), а также реализована ПАЗ (SFoE). EtherCAT позволяет использовать Ethernet до уровня устройств ввода-вывода без значительных технических ухищрений и экономических затрат. Возможности использования максимальной ширины канала Ethernet и работы в режиме реального времени при низких затратах являются отличительными особенностями данной промышленной сети.
Заключение
В настоящее время появились различные тенденции в применении Ethernet на полевом уровне систем автоматизации. Разные подходы обещают высокую скорость, низкие затраты, упрощённую вертикальную интеграцию, применение стандартных компонентов из сектора офисных устройств, незначительные затраты на конфигурацию и диагностику, и всё это в сочетании с требуемым масштабом реального времени.
EtherCAT идёт другим путём и объединяет преимущества технологии полевой шины с неоспоримыми достоинствами Ethernet. Пропускная способность канала задействована практически полностью, а затраты уменьшены за счёт простой коммутации EtherCAT-устройства через интегрированный контроллер. Стандартные компоненты используются именно там, где они должны быть стандартными, – на уровне управления, а не в 2-битовом терминале ввода-вывода. Для EtherCAT не требуются IP-адреса, конфигурация выполняется автоматически под управлением мастера с использованием простого алгоритма. Тем не менее вертикальная интеграция также возможна, а устройствам, которым требуется IP-адрес, он будет назначен, после чего они будут прозрачно интегрированы в сеть.
EtherCAT позволяет реализовать управление для высокопроизводительного оборудования с обменом множеством распределённых сигналов в цикле, значительно меньшем 100 мкс. Более того, технология пригодна и для недорогих решений, где будет достаточно времени цикла, большего на порядки, например для систем автоматизации зданий с циклом 100 мс. В таких решениях любой коммерческий компьютер или контроллер с интегрированным Ethernet-портом можно использовать как мастер.
EtherCAT предлагает унифицированный высокопроизводительный базис коммуникации для всего сектора автоматизации. Одна и та же система может использоваться как в небольших ПЛК, так и в высокопроизводительных ЧПУ.
Статья подготовлена на основе материалов ETG (www.ethercat.org). ●
E-mail: vts_develop@mail.ru
Если вам понравился материал, кликните значок - вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал - не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!



