
Когда мы протягиваем руку, чтобы взять предмет, как бутылку, нам не нужно точно знать его местоположение. Это возможно благодаря податливым или мягким взаимодействиям между предметом и нашей рукой. Как объясняет исследователь EPFL Кай Юнге, если вы хотите создать робота, способного повторить этот процесс, необходимо учесть все детали окружающей среды.
Податливые материалы — это такие, которые могут деформироваться, сгибаться или сжиматься. В роботизированной руке ADAPT от CREATE Lab (Adaptive Dexterous Anthropomorphic Programmable sTiffness) используются такие простые материалы, как силиконовые полоски, обернутые вокруг механического запястья и пальцев, а также подпружиненные суставы. Этот стратегически распределенный подход позволяет устройству захватывать разнообразные объекты с помощью «самоорганизующихся» захватов, которые происходят автоматически, без необходимости программирования.
В серии экспериментов рука ADAPT смогла захватить 24 различных объекта с вероятностью успеха 93%, используя захваты, которые имитировали естественный человеческий хват с прямым сходством 68%. Исследование было опубликовано в журнале Nature Communications Engineering.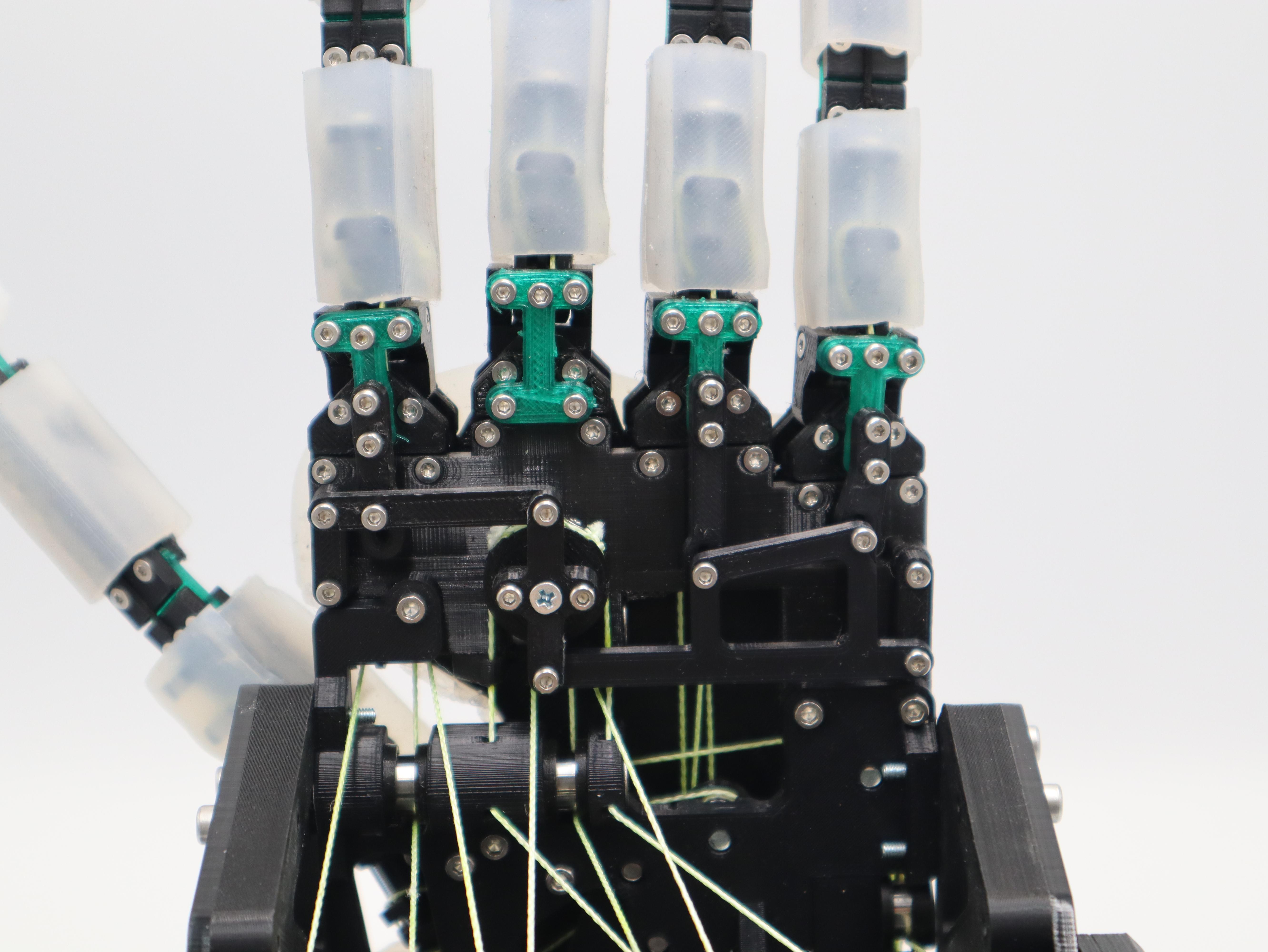
В отличие от традиционных роботизированных рук, которые требуют двигателей для приведения в действие каждого сустава, рука ADAPT использует только 12 двигателей, размещенных в запястье, для 20 суставов. Оставшаяся часть управления осуществляется с помощью пружин, которые могут быть подстроены для изменения податливости руки, а также силиконовой «кожи», которую можно добавлять или удалять.
Робот запрограммирован на перемещение через четыре ключевых положения для поднятия объекта, после чего все адаптации происходят автоматически. Это так называемое управление «разомкнутым контуром». Например, робот может адаптировать свою хватательную позу под различные объекты, начиная от болта и заканчивая бананом.
Исследователи из EPFL подчеркивают важность использования распределенного механического интеллекта, который аналогичен взаимодействию различных частей человеческого тела — кожи, мышц и суставов. Это отличается от традиционного подхода, при котором весь интеллект сосредоточен в «мозге» робота.
Целью исследования ADAPT было не просто создание руки, имитирующей человеческий захват, а демонстрация того, как робот может достичь значительных результатов исключительно через податливость материалов. Теперь команда EPFL стремится интегрировать элементы управления замкнутого цикла в руку ADAPT, добавив сенсорную обратную связь, такие как датчики давления на силиконовую кожу, и искусственный интеллект. Этот синергетический подход обещает создать роботов, которые будут сочетать надежность податливости с точностью управления и обратной связью.
Источник: https://actu.epfl.ch/news/robotic-hand-moves-objects-with-human-like-grasp-2/
Если вам понравился материал, кликните значок - вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал - не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





