
Требования к полосе пропускания будущей БКС
К бортовой коммуникационной сети (БКС) предъявляют следующие требования: широкая полоса пропускания, малые задержки и высокая надёжность при работе в неблагоприятных условиях внутри автомобиля. На протяжении многих лет существовало несколько технологий, которые использовались в БКС (рис. 1).

К ним относятся аналоговая сеть, Controller Area Network (CAN), FlexRay, Local Interconnect Network (LIN), низковольтная дифференциальная передача сигналов (LVDS) и система передачи мультимедийных данных (MOST).
Но, глядя на приложения следующего поколения, мы понимаем, что эти устаревающие технологии не могут поддерживать требования к пропускной способности. Кроме того, некоторые из них являются проприетарными и очень дорогими.
Чтобы лучше понять требования к пропускной способности, запомните, что приблизительную скорость передачи видеопотока можно рассчитать по следующим формулам:
- Размер кадра = Разрешение × Глубина цвета
- Скорость передачи данных = Размер кадра × Частота кадров
Таким образом, для камеры передовой системы помощи водителю (ADAS), снимающей изображение 1080p с глубиной цвета 24 бита и частотой кадров 30 кадров в секунду, поддерживаемая скорость передачи данных равна:
- Размер кадра = 1920 × 1080 × 24 = 49 766 400 бит
- Скорость передачи данных = 49 766 400 × 30 = 1493 Мбит/с
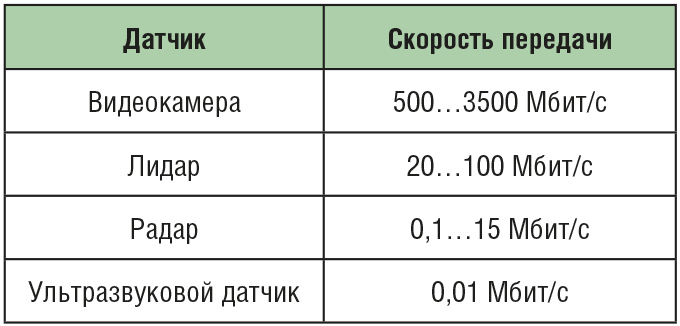
В таблице приведены типичные требования к пропускной способности канала связи для данных от различных датчиков, задействованных в беспилотном вождении.
Многочисленные конкурирующие стандарты для БКС
- Автомобильный Ethernet. Автомобильный Ethernet считается заменой устаревших технологий БКС. Большинство автомобилей сегодня оборудовано Ethernet 100BASE-T (100 Мбит/с). Различные производители применяют его в разных целях, например, Hyundai – для информационно-развлекательных систем, а Volkswagen – для подключения ADAS. В 2019 и 2020 гг. стандарт был дополнен более низкими (10 Мбит/с) и более высокими (гигабитными) скоростями передачи данных. Разработанная в начале 2020 г. новейшая версия стандарта с названием 802.3ch предусматривает скорости передачи данных 2,5, 5 и 10 Гбит/с. Кроме того, в 2020 году новая рабочая группа IEEE 802.3cy начала разработку физического уровня автомобильных БКС на 25, 50 и 100 Гбит/с.
- SERDES (ASA). Другой стандарт для БКС основан на протоколе последовательно-параллельного интерфейса (SERDES). Организация Automotive SerDes Alliance была основана в 2019 г. компаниями BMW, Broadcom, Continental, Fraunhofer, Marvell и NXP с целью стандартизации SERDES. В настоящее время в неё входят 36 участников. Организация была создана для расширения экосистемы за пределы доступных тогда проприетарных решений SERDES, таких как FPD-Link от Texas Instruments, GMSL от Maxim Integrated и Apix от Inova Semiconductor. Новый стандарт обеспечивает передачу данных со скоростью от 3,6 до 13 Гбит/с при длине линии до 15 метров.
- SERDES (MIPI A-PHY). В ноябре 2020 г. организация MIPI Alliance выпустила спецификацию A-PHY v1.0 для физического уровня автомобильного SERDES. Спецификация разрешает асимметричную передачу данных в соединениях типа «точка-точка» или «шлейф» с дополнительной возможностью подачи питания. Скорость передачи данных равна 16 Гбит/с. Планируется увеличение до 48 Гбит/с по нисходящему каналу и до 200 Гбит/с по восходящему. Задержка низкая – 6 мкс, длина линии достигает 15 м. Основное назначение – соединение датчиков с процессором сигналов изображения в электронном блоке управления (ЭБУ) и графического процессора сигналов в ЭБУ с дисплеями.
Сеть на основе Ethernet, SERDES или обоих сразу?
Некоторые автопроизводители и поставщики решений с уровнем надёжности Tier 1 считают, что первые несколько лет они могут использовать оба стандарта. Однако после этого автомобильный Ethernet со скоростью передачи данных до 100 Гбит/с вытеснит все остальные решения.
Но Кирстен Матеус (Kirsten Matheus), инженер BMW, имеет несколько иную точку зрения. Она предположила, что SERDES является необходимой и оптимальной технологией для соединений «точка-точка» датчиков ADAS, которые передают асимметричные данные, в то время как сетевая технология Ethernet подходит для других автомобильных приложений. Учитывая, что Кирстен сыграла ключевую роль в стандартизации автомобильного Ethernet, с её мнением нельзя не считаться. (Источник: Automotive SerDes Alliance kick-off, май 2019, Salt Lake City.)
Производители автокомплектующих, стремящиеся оптимизировать свои планы совершенствования БКС, могут принять одну из двух стратегий:
- стратегия хеджирования, то есть внедрение обоих стандартов для БКС до тех пор, пока требования ADAS для беспилотного вождения уровней 3–5 не станут намного яснее. Недостатком такого подхода является то, что для перевода данных между различными доменами/зонами могут потребоваться шлюзы, а это увеличивает как стоимость, так и массу;
- техническая стратегия, т.е. проектирование с учётом потребности в создании высокоскоростных каналов связи «точка-точка» путём увеличения степени обработки и сжатия данных на каждом датчике. Недостатком такого подхода является то, что стоимость комплекта датчиков возрастёт, а более глубокая обработка потребует отвода тепла.
Тестирование БКС
При тестировании БКС важно проверить производительность передатчика, приёмника и канала. Поскольку необходимо проводить сотни тестов, программное обеспечение для автоматизированного тестирования на соответствие требованиям спецификаций с их интерпретацией, воспроизводимыми результатами, мастерами настройки с удобными графическими интерфейсами и генерацией отчётов так же важно для специалистов по автомобильной электронике, как и высокие технические характеристики, такие как полоса пропускания, частота выборки и разрешение сигнала.
Тестирование передатчика выполняют в основном с помощью осциллографа, чтобы убедиться, что передаваемые сигналы не являются причиной помех, в то время как тестирование приёмника выполняют для проверки точности обнаружения входных сигналов. Для этого используют источники испытательных сигналов, такие как генераторы сигналов произвольной формы. Измерения импеданса и обратных потерь важно выполнять во временно'й и частотной областях, чтобы обеспечить надёжную работу системы и диагностику нарушений целостности сигнала.
Заключение
Со времён Хиллман Хантер автомобильная промышленность прошла долгий путь. Переход на беспилотные и «подключённые» автомобили создаёт проблемы, которые необходимо решать с помощью бортовой коммуникационной сети. Множество датчиков, элементов управления и интерфейсов, необходимых для ADAS и новых информационно-развлекательных функций, требуют высокоскоростных соединений, и ресурсов традиционных сетей, таких как CAN, MOST и FlexRay, будет недостаточно. С появлением новых стандартов, таких как автомобильный Ethernet и SERDES, появилась возможность более быстрой передачи данных и удовлетворения потребностей будущих «подключённых» автомобилей.
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!



