
Пандемия 2020 года внесла ощутимые коррективы в сложившиеся жизненные уклады населения различных стран независимо от уровня развития их экономики. Отдельные отрасли, такие как фармакология, информационные технологии, стали мегабенефециарами, другие – получили и реализовали шанс для выхода на рынок с передовыми разработками, которые в другой обстановке появились бы в широком повседневном обиходе только в «эволюционном» порядке – через 3…5 лет. Такими счастливчиками стали, среди прочих, разнообразные беспилотные системы, которые, в свою очередь, немыслимы без надёжных систем автономной навигации.
Неавтономные методы навигации знакомы нам с детства и основываются на использовании внешних ориентиров или сигналов, например звёзд, маяков, радиосигналов и т.п. Эти методы достаточно просты, но в ряде случаев не могут быть реализованы изза отсутствия видимости, а также подготовленной инфраструктуры с опорными точками, наличия помех для радиосигналов и т.д. Таким образом, потребность в автономных навигационных системах стала причиной возникновения инерциальной навигации.
В общем случае инерциальной навигацией называют метод навигации – определения координат и параметров движения различных объектов (автомобилей, судов, самолётов, ракет и др.) и управления их движением, основанный на свойствах инерции тел и являющийся автономным, то есть не требующим наличия внешних ориентиров или поступающих извне сигналов.
Инерциальные навигационные системы для беспилотного транспорта
В 2018 году Лаборатория Микроприборов разработала инерциальную навигационную систему (ИНС) ГКВ11 с встроенным приёмником ГНСС (Global Navigation Satellite System, глобальная навигационная спутниковая система) метровой точности. Данный модуль позволяет получить курс объекта, например автомобиля, в движении, рассчитать ориентацию и поддерживать автономную навигацию при кратковременной потере сигнала ГНСС (см. рис. 1).

ИНС ГКВ состоят из МЭМСдатчиков – датчиков угловой скорости и акселерометров, высокопроизводительного вычислителя, приёмника ГНСС, магнитометра и необходимой периферии. Для вычисления навигации инерциальный модуль обрабатывает инерциальные и ГНССданные. Ошибки, вызванные шумами и нестабильностью инерциальных датчиков, корректируются по данным ГНССприёмника.
Для беспилотного транспорта приёмника ГНСС метровой точности недостаточно, необходимо использовать приёмники, вычисляющие координаты с сантиметровой точностью в реальном времени (RTK – Real Time Kinematic). Поэтому была проведена модернизация ГКВ11, в ходе которой внутрь устройства интегрирован двухчастотный ГНССприёмник с поддержкой функции RTK.
Дальнейшим развитием ИНС с интеграцией ГНСС явилось создание инерциальных модулей ГКВ12 с двухантенным решением для получения курсовой информации в статическом положении (см. рис. 2).

Модули ГКВ12 используются, в частности, в проекте беспилотного автомобиля, разрабатываемом Московским автомобильнодорожным государственным техническим университетом (МАДИ), предыдущая версия, принимавшая участие в квалификационных заездах конкурса беспилотного транспорта «Зимний город», показана на рис. 3.

Комплексирование инерциальной навигации с ГНСС
Комплексированное навигационное решение позволяет вычислять ориентацию ИНС с высокой точностью при высокой динамике, в зависимости от характеристик датчиков – от 0,5 до 0,01°, а также работать автономно при отключении или пропадании ГНССсигнала. Чем стабильнее и точнее инерциальная часть, тем дольше будет сохраняться навигация без дополнительной коррекции. На рисунках 4…6 показаны проезды под мостом, по туннелю, а также при плотной городской застройке.



Общий принцип вычисления навигации инерциальным модулем с коррекцией от ГНССприёмника, или как работает комплексированное навигационное решение
Навигационный алгоритм считает навигационное решение в геодезической системе координат (СК) СеверВостокНиз (NED). Начало СК в точке включения или при включении в движении в точке схождения решения с координатами XYZ, где X – проекция вектора положения на ось, направленную на север, Y – на ось, направленную на восток, Z – на ось, направленную по вектору силы тяжести Земли.
ГНСС передаёт координаты в геоцентрической ECEF (Earthcentered, Earthfixed) или эллиптической LLA (геодезические широта, долгота, высота) системах координат, которые внутри алгоритма преобразуются в СК NED и выполняется коррекция инерциальной навигации. Абсолютная точность координат, выдаваемых навигационным алгоритмом, в геодезической СК полностью зависит от точности координат ГНССприёмника.
После включения ИНС и ГНСС работа навигационного алгоритма построена следующим образом:
- выставка – вычисление углов склонения в стартовой системе координат и нулевых значений инерциальных датчиков;
- вычисление курса в достоверном интервале;
- доворот стартовой СК к NED;
- основная работа навигационного алгоритма.
При этом важно:
- координаты XYZ начинают рассчитываться с момента вычисления углов склонения, но так как курс в начальный момент может быть неизвестен, то после этапа 2 происходит коррекция (учёт полученного курса) и координаты доворачиваются до СК NED скачком;
- до основной работы навигационного алгоритма выдаваемые координаты в географической СК полностью копируют координаты от приёмника ГНСС;
- по умолчанию инерциальные данные выдаются с частотой 1 кГц, но обновление навигационного алгоритма в текущей реализации производится с частотой 100 Гц, поэтому ориентация, скорости и координаты обновляются с частотой не более 100 Гц.
Типы выставки навигационного алгоритма
К моменту настоящей публикации Лабораторией Микроприборов представлено четыре типа выставки для навигационного алгоритма с коррекцией от данных ГНССприёмника для различных прикладных задач.
Выставка из покоя
Инерциальный модуль должен находиться в состоянии покоя, т.е. угловые скорости и кажущееся линейное ускорение не должны меняться первые 10 с, за это время усредняются показания датчиков угловой скорости (ДУС) и акселерометров. Усреднённое значение ДУС в дальнейшем учитывается как смещение нулей ДУС, а усреднённые значения акселерометров применяются для вычисления начальных углов склонения. Курс вычисляется после начала движения при достижении приёмником ГНСС порогового значения горизонтальной скорости в течение определённого времени. По умолчанию это скорость 2 м/с в течение непрерывного периода времени 2000 мс. До момента вычисления курса рекомендуется двигаться прямолинейно.
Указанный выше временной интервал 10 с выбран, исходя из времени корреляции нестабильности смещения нуля ДУС по дисперсии Аллана (среднеквадратическое относительное двухвыборочное отклонение), но этот параметр может быть задан пользователем.
Выставка в динамике на основе данных ГНСС
Алгоритм постоянно пробует найти участок, где можно вычислить начальные углы, как правило, это участок с постоянной горизонтальной скоростью, и далее ждёт манёвра в течение 20 с, т.е. изменения скорости для вычисления курса и доворота стартовой СК к геодезической СК и переходу к основному навигационному алгоритму.
Выставка в кáчке на основе данных ГНСС
Для работ на воде была введена отдельная выставка, при которой алгоритм ищет начальные углы склонения. Затем расчёт корректируется минимум каждые 1000 мс от ГНСС. Корректировка по курсу производится отдельной командой, после чего запускается основной навигационный алгоритм.
Выставка из покоя с использованием курса от ГНСС
Специально для беспилотных автомобилей введена выставка без начального поиска курса. Переход к основному навигационному решению осуществляется после выставки из покоя сразу же, при условии получения от ГНСС флага фиксированного решения и данных о курсе между мастерантенной и роверантенной. Такая выставка возможна при использовании модуля ГКВ12 или внешнего ГНССприёмника с двумя антеннами.
Коррекция по поведенческой модели автомобиля
Существует возможность длительного удержания автономного навигационного решения при наложении ограничений на кинематическую модель. Например, для автомобиля можно оставить скорость по ходу движения без коррекции или корректировать от одометра, а остальные скорости принять равными нулю, т.к. автомобиль в общем случае не едет боком и не взлетает.

В таком случае значительно повышается время автономной работы навигационного модуля. При проезде под мостом алгоритм с коррекцией по модели автомобиля приводит в точку возобновления ГНССрешения (см. рис. 7), в то время как чисто автономный навигационный алгоритм допускает бо¢льшую ошибку (см. рис. 8).

Особенно это заметно при более динамичном движении, таком как заезд на многоуровневую стоянку по спиральному подъёму. Алгоритм с наложением ограничений повторяет траекторию движения по спирали (вид сверху – круг), в то время как чистая автономная навигация «разваливается», и видно, что ось спирали наклонена.

Такая коррекция может использоваться для удержания координат при парковке прокатных автомобилей на многоуровневых крытых паркингах, где возникают проблемы с завершением аренды изза выхода за разрешённую зону парковки (см. рис. 9).
Почему инерциальная навигационная система ошибается
Основную массу ошибок составляют ошибки ориентации. В сводной таблице приведён анализ влияния ошибок на расчёт скорости и положения (см. табл.).
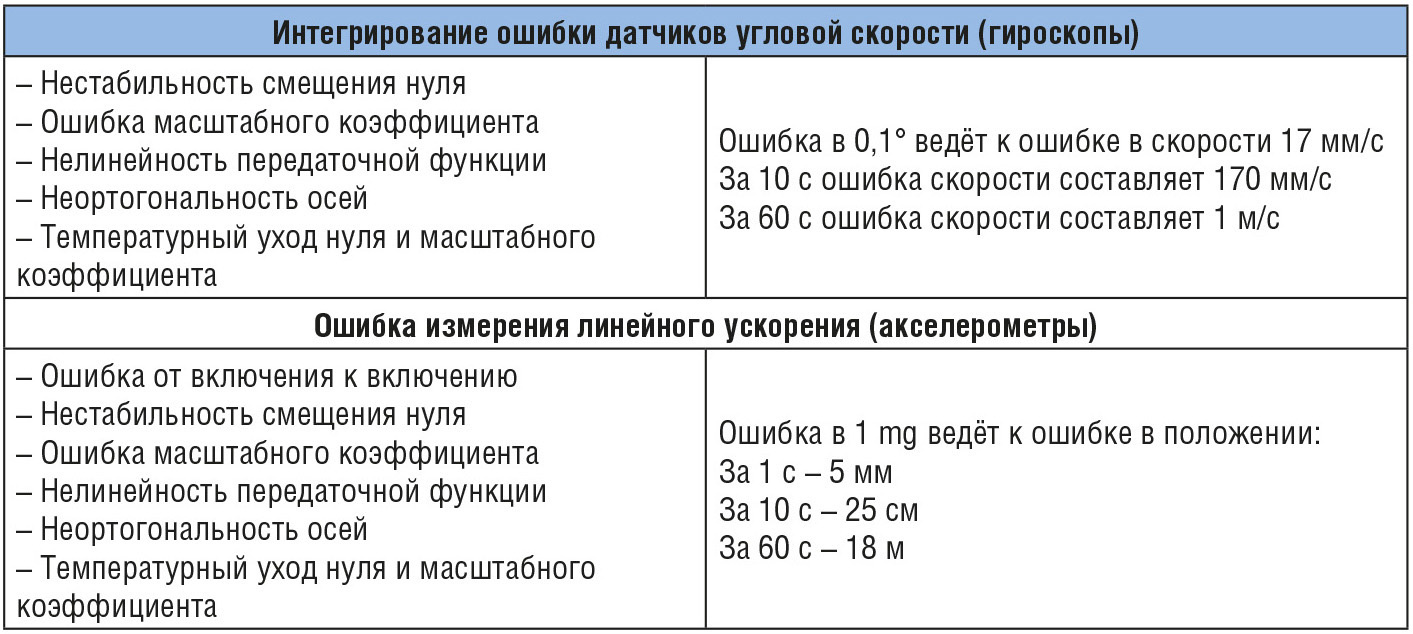
Ошибка в масштабном коэффициенте особенно заметна при постоянном вращении в одном направлении. Как правило, движение автомобилей носит случайный характер, и сумма всех поворотов стремится к нулю, поэтому ошибка масштабного коэффициента вносит в таких случаях малый вклад.
При ошибке ориентации угловая скорость по одной из осей вращения вносит свою проекцию на остальные оси, например, при ошибке в 1 мрад (0,057 °/с) проекция угловой скорости вдоль оси Z, равная 120°/с, на осях X (крен) и Y (тангаж) составит 0,12 °/с, за 3 с вращения (поворот на 360°), ошибка ориентации увеличится по крену и тангажу на 0,36°.
Для списывания накопленных ошибок ИНС необходимо подключать дополнительные источники коррекции на других принципах работы. Для беспилотного автомобиля корректорами могут выступать:
- датчик скорости;
- лидар;
- радар;
- одометр;
- датчик давления;
- другие источники.
Другие варианты применения
Беспилотные летательные аппараты (БПЛА)
Для БПЛА были разработаны малогабаритные инерциальные модули ГКВ5 и ГКВ6, которые могут использоваться в составе автопилота или для проведения геодезических изысканий, таких как фотограмметрия или создание облака точек с привязкой к координатам.
Наведение и стабилизация спутниковых антенн
Лабораторией Микроприборов был разработан алгоритм наведения и стабилизации спутниковых антенн при движении по суше, в воздухе и на море. В качестве корректора используется ГНССприёмник, но также возможна коррекция по уровню сигнала от космического спутника.
К настоящему моменту ООО «ЛМП» одновременно реализует 10 проектов по беспилотной навигации с использованием описанных подходов, а общее число находящихся в активной разработке клиентских проектов с использованием инерциальных МЭМС датчиков – свыше 30 на начало 2021 года, всего же более 100 отечественных и зарубежных компаний внедрили или намерены внедрить продукцию и технические решения российского производителя.
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!



