
Введение
Задача обнаружения сигнала в коррелированной помехе решается в два этапа: «обеление» помехи и затем обнаружение сигнала на фоне белого шума. «Обеление» помехи осуществляется цифровым режекторным фильтром, весовые коэффициенты которого определяются обратной корреляционной матрицей помехи. В реальных условиях корреляционная матрица помехи неизвестна, поэтому производится адаптивная обработка, предполагающая оценку корреляционной матрицы помехи и её обращение [1].
Практическая реализация такой обработки затруднительна, особенно при обработке комплексной входной выборки помехи и сигнала.
Последетекторная межпериодная обработка (МПО) использует выходные сигналы амплитудного детектора, и вычислительные операции производятся с действительными числами, что упрощает реализацию обработки. Структура МПО представляет собой адаптивный матричный обеляющий фильтр (ОФ) и блок скалярного перемножения выходных сигналов фильтра [2].
Целью статьи является определение характеристик обнаружения последетекторной МПО при различных моделях сигнала и помехи.
Модель сигнально-помеховой обстановки
Сигнал и помеха полагаются взаимно-независимыми гауссовыми (до детектора) случайными векторами размерности М с корреляционной матрицей (КМ) межпериодных флуктуаций импульсов пачки М:
- КМ шума:
где σ2N – мощность шума, {IM} – единичная матрица М × М; - КМ помехи:
где σ2P – мощность шума, ρij – коэффициент корреляции; - КМ некогерентного сигнала:
где σ2S – мощность сигнала; - КМ когерентного сигнала:
Методика расчётов
Для определения D при заданной величине F производится вычисление закона распределения выходного процесса МПО, который определяется выражением:
где x – M-мерный вектор пачки входного процесса ОФ, H – матричная импульсная характеристика (МИХ) ОФ, размерности M × M.
МИХ H определяется из соотношения:
и представляет собой «корень» матрицы ˆψΧ, обратной КМ ˆΦΧ.
Вычисление ˆΦΧ производится путём расчёта КМ-процесса после амплитудного детектора в соответствии с формулой [3]:
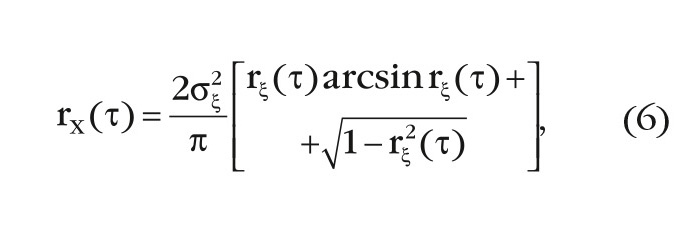
где σ2ξ, rξ (τ)– параметры корреляционной функции процесса на входе амплитудного детектора.
Значения rΧ(τ), взятые при отсутствии сигнала, являются элементами обучающей матрицы ˆΦΧ, определяющей МИХ H.
Обнаружение при некогерентном сигнале
Обучающая матрица ˆΦΧ размерности M × M, полученная из Φ′N в соответствии с (6) имеет вид:
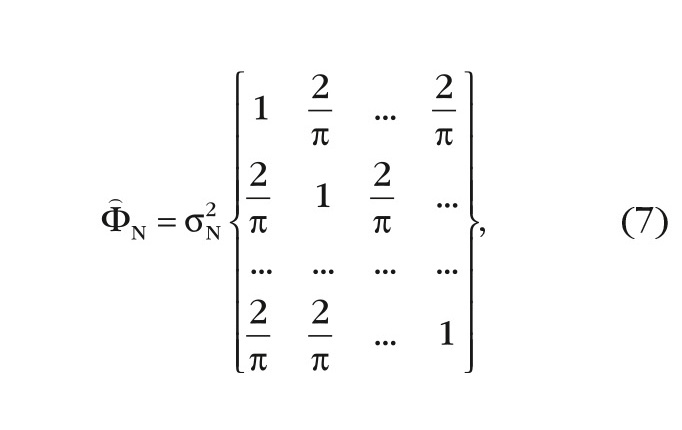
КМ шума на выходе ОФ:
так как ˆΦN=H-1×(H-1)T.
Выход МПО есть сумма квадратов выходных сигналов ОФ. В соответствии с (8) эти сигналы представляют М взаимонезависимых гауссовых величин с нулевым математическим ожиданием и одинаковой единичной дисперсией, и плотность вероятности выходного шума МПО подчиняется χ2-распределению [3]:
Где Г( ) – гамма-функция.
Вероятность ложной тревоги F равна:
где T – пороговый уровень.
Из (10) следует, что F зависит только от М и Т.
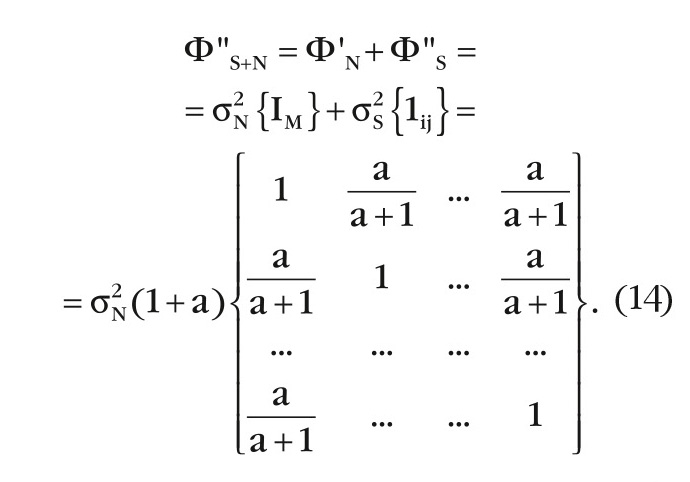
Для смеси сигнал + шум:
где a=σS2/σN2 – отношение сигнал / шум, отсюда следует, что КМ смеси сигнал + шум равна:
таким образом, КМ ФS+N отличается от ˆΦN только величиной дисперсии, увеличенной в (1 + a).
КМ смеси сигнал + шум на выходе ОФ равна:
и, следовательно, выходные сигналы ОФ также являются М взаимонезависимыми гауссовыми случайными величинами с нулевым математическим ожиданием и одинаковой дисперсией (1 + а), поэтому плотность вероятности выходного сигнала МПО имеет вид [3]:
Вероятность правильного обнаружения D равна:
Характеристики обнаружения, рассчитанные в соответствии с (13), приведены на рисунке 1.
")
Обнаружение при когерентном сигнале
Обучающая матрица ˆΦN остаётся без изменений и имеет вид (7), и, следовательно, плотность вероятности выходного шума МПО определяется выражением (9).
Для смеси сигнал + шум:
В результате преобразования (6) матрица ФS+N содержит значения π/2 в главной диагонали, и значения (a/(a+1))arcsin(a/(a+1))+√1−(a/(a+1))2 для недиагональных элементов. Таким образом, ФS+N существенно отличается от ФN и плотность вероятности смеси сигнал + шум не может быть описана выражением (12).
Аналитическое определение плотности вероятности смеси сигнал + шум на выходе МПО не представляется возможным, и выражения для pS+N(x,M) получены по результатам имитационного моделирования. Обработка результатов моделирования показывает, что плотность вероятности процесса на выходе МПО с высокой степенью точности аппроксимируется логнормальным распределением вида
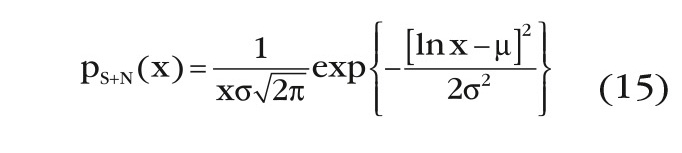
с параметрами µ и σ, зависящими от М и а, приведёнными на рисунке 2.
")
Вероятность ложной тревоги F и пороговый уровень T определяются выражением (10), а вероятность правильного обнаружения D определяется выражением
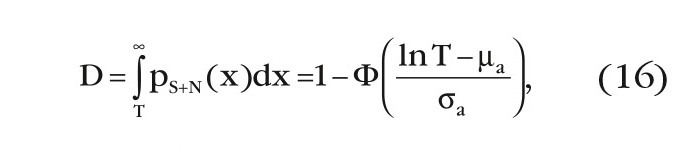
где
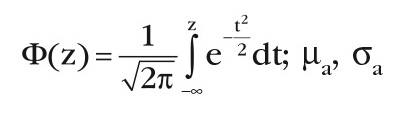
– параметры распределения при а ≠ 0 из рисунка 2.
Характеристики обнаружения, рассчитанные в соответствии с (16), приведены на рисунке 3.
")
Обнаружение в коррелированной помехе
Обучающая матрица ˆФS+N определяется преобразованием (6) КМ ˆФ′S+N суммы шума с помехой:
где η=σ2P/σ2N – отношение помеха / шум, ρij – коэффициенты экспоненциальной корреляционной функции.
В результате матрица ˆФS+N имеет значения π/2 в главной диагонали и значения dij для недиагональных элементов
Так как при отсутствии сигнала КМ входного процесса МПО равна КМ ˆФS+N, то КМ выходного процесса МПО равна {IM} и закон распределения его имеет вид (9).
В работе [4] показано, что при взаимодействии сигнала с коррелированной помехой когерентность пачки не имеет значения.
КМ смеси сигнал + помеха + шум при σ2P >>σ2S может быть представлена в виде [5]:
где Ω – разность допплеровских частот помехи и сигнала, Т – период зондирования.
В результате преобразования (6) КМ ФS+P+N имеет значения π/2 в главной диагонали и значения cij для недиагональных элементов матрицы:
Результаты моделирования показывают, что и в этом случае плотность вероятности процесса на выходе МПО соответствует логнормальному распределению (15) с параметрами µ и β, зависящими от М, а, η, ΩT, ρij, γ (ΩT = π; а = 10 дБ; γ=σ2P/σ2N; ρij = 0,99i–j; M = 3, 5, 8) и приведёнными на рисунке 4.
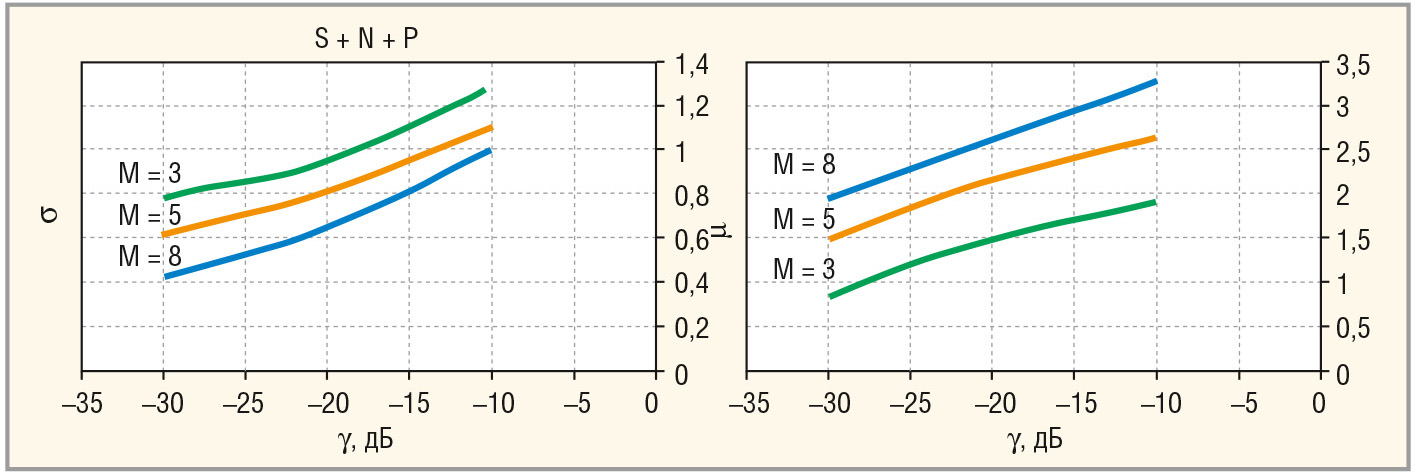
Вероятность ложной тревоги F и пороговый уровень T также определяются выражением (10), а вероятность правильного обнаружения D равна:
где µγ и βγ – параметры распределения (15) при γ ≠ 0 из рисунка 4.
Характеристики обнаружения, рассчитанные в соответствии с (20) приведены на рисунке 5.
")
Заключение
Последетекторная МПО с обеляющим фильтром обеспечивает обнаружение сигнала в коррелированной помехе.
Отличительными особенностями последетекторной МПО является стабильный уровень ложных тревог, не зависящий от параметров распределения шума и помехи, и некритичность к когерентности сигнала.
Последнее обстоятельство особенно важно для радиолокационных станций с некогерентными сигналами.
Литература
- Бартенев В.Г. Квазиоптимальные адаптивные алгоритмы обнаружения сигналов. Современная электроника. 2011. №2.
- Леховицкий Д.И., Кириллов И.Г., Бурковский С.И. Особенности междупериодной обработки сигналов на фоне пассивных помех в некогерентных импульсных РЛС. Журнал радiоелектроннi i комп’ютернi системи. 2005. №2 (10). С. 51–57. www.khai.edu/csp/nauchportal/Arhiv/REKS/2005/REKS205/pdf/Lehovick.pdf.
- Тихонов В.И. Статистическая радиотехника. 2-е изд., перераб. и доп. М. Радио и связь. 1982. С. 624.
- Морская радиолокация. Под ред. Винокурова В.И. Л. Судостроение. 1986. С. 256.
- Чухломин И.Е., Файзулин Н.А. Эффективность некогерентной межпериодной обработки на основе обеляющего фильтра. IX Всероссийская конференция «Радиолокация и радиосвязь». ИРЭ РАН. Москва. 2015.
Если вам понравился материал, кликните значок — вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал —не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





