
Цели
В то время как в сфере компьютерных приложений объектно-ориентированное программирование (ООП) давно стало составной частью всех ведущих языков, в сфере контроллерных приложений оно применяется крайне редко. Говорят, что это происходит в силу некоторой консервативности, свойственной программистам контроллеров (ПЛК). Отчасти это действительно так. Но всё же в более значительной степени здесь сказываются ограниченные возможности инструментов программирования. Конечно, почти все современные контроллерные платформы дают возможность так или иначе использовать C++ (за дополнительные деньги). Однако компилятор обеспечивает только лишь аспекты чистого программирования. Функции отладки и ввода в эксплуатацию этих систем практически непригодны для контроллерных приложений. Даже для элементарного мониторинга значений входов-выходов приходится писать вызовы библиотечных функций. О таких приёмах, как «горячая» замена кода прикладной программы без остановки контроллера, вообще нужно забыть. Помимо этого автоматы и задачи с битовыми операциями реализуются в C++ достаточно сложно.
Требования
В результате компанией 3S-Smart Software Solutions было принято решение расширить нормы стандарта МЭК 61131-3, введя поддержку ООП в новое поколение системы программирования CoDeSys. Расширения стандарта должны подчиняться следующим требованиям:
-
ООП-расширения должны быть не обязательными, а опциональными;
-
ООП- и не ООП-программирование можно совмещать;
-
существующие приложения должны полностью поддерживаться с возможностью их плавной трансформации в ООП с учетом целесообразности;
-
ООП должно быть применимо во всех языках МЭК 61131-3;
-
программист не должен сталкиваться со сложными определениями.
Расширения
Основное расширение МЭК 61131-3 касается превращения функционального блока (FUNCTION_BLOCK) в класс. Подобным образом структуры выросли в классы в языке C++. Это достигается введением методов. Фактически метод — это функция, встроенная в функциональный блок. В реализации функции доступны не только значения её параметров и локальных переменных, но и данные экземпляра функционального блока. В итоге вызов метода всегда включает имена экземпляра и метода.
Следующий пример показывает определение и вызов простого метода.
TYPE Direction: (Forward, Backward);
END_TYPE
FUNCTION_BLOCK Pump
VAR
Enabled: BOOL;
Direction: Direction;
END_VAR
METHOD GetState : BOOL
GetState := Enabled;
END_METHOD
METHOD Start: BOOL (* Метод Start *)
VAR_INPUT
WantedDirection: Direction;
END_VAR
Enabled := TRUE;
Direction := WantedDirection;
END_METHOD
END_FUNCTION_BLOCK
PROGRAM Main
VAR
Pump1: Pump;
Pump2: Pump;
END_VAR
Pump1.Start(Forward); (* Вызов метода Start *)
Pump2.Start(Backward);
END_PROGRAM
Естественно, вызов метода можно выполнить и в графических языках (рис. 1).

Даже если функциональный блок имеет методы, ничто не мешает использовать его обычным образом, как определено в стандарте МЭК 61131-3.
Помимо пользовательских методов и стандартной реализации, функциональный блок включает два предопределённых метода: Init и Exit. Init вызывается неявно для всех экземпляров всех функциональных блоков после загрузки кода приложения или «холодного» рестарта контроллера. Exit вызывается перед «горячим» обновлением кода экземпляра, перед сбросом или управляемым отключением питания ПЛК. Например, его можно применить для корректного завершения работы.
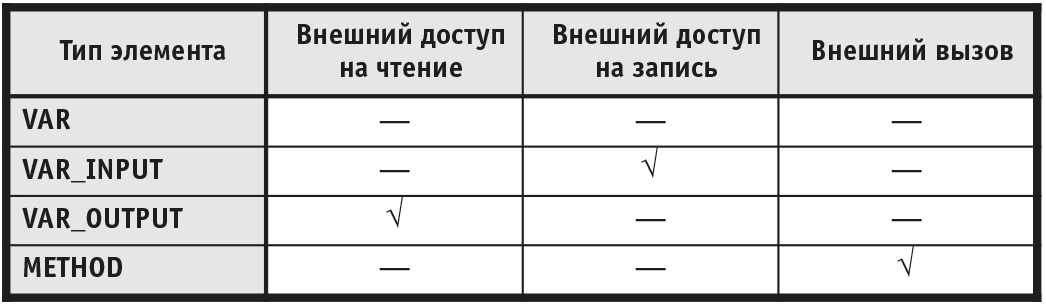
Для упрощения правила видимости заданы жёстко:
Уже существующий класс может быть дополнен с помощью ключевого слова EXTENTS.
FUNCTION_BLOCK MonitoredPump EXTENTS Pump
VAR
MonitoredState: (OK, Error);
END_VAR
METHOD HasError : BOOL;
HasError := MonitoredState <> OK;
END_METHOD
END_FUNCTION_BLOCK
PROGRAM Main
VAR
Pump1: Pump;
Pump2: MonitoredPump;
END_VAR
Pump1.Start(Forward);
IF NOT Pump2.HasError THEN
(* Все методы базового класса доступны *)
Pump1.Start(Backward);
END_IF
END_PROGRAM
Однако реальную мощь ООП даёт возможность создания интерфейсов. Под интерфейсом понимается набор методов, работающих с одинаковыми параметрами, но разными реализациями для разных функциональных блоков. Интерфейс можно передать в качестве параметра, и программный компонент (POU) не будет в действительности заботиться о том, какой функциональный блок им применяется.
Следующий пример иллюстрирует данную технику:
INTERFACE Drive
METHOD HasError : BOOL;
END_METHOD
METHOD Home : BOOL;
END_METHOD
METHOD MoveAbsolute : BOOL;
VAR_INPUT
Pos: DINT;
END_VAR
END_METHOD
END_INTERFACE
Теперь мы можем написать несколько функциональных блоков, реализующих интерфейс Drive (привод) с помощью ключевого слова IMPLEMENTS.
FUNCTION_BLOCK CANDrive IMPLEMETS Drive
VAR
CANId: DINT;
State: (OK, ParamError, DriveError, CommError);
InHoming: BOOL;
END_VAR
METHOD HasError : BOOL;
HasError: State <> OK;
END_METHOD
METHOD Home : BOOL;
IF NOT InHoming THEN
WriteSDO(CANId, 16#4711, 16#02, 1);(* Команда на исх. *)
InHoming := TRUE;
ELSE
Home := ReadSDO(CANId, 16#4711, 16#03);
InHoming := NOT Home;
END_IF
END_METHOD
METHOD MoveAbsolute : BOOL;
VAR_INPUT
Pos: DINT;
END_VAR
... (* Реализация абсолютного перемещения *)
END_METHOD
METHOD SetCanId : BOOL;
VAR_INPUT
Id: DINT;
END_VAR
CANId := Id;
END_METHOD
END_FUNCTION_BLOCK
Как можно видеть, все методы интерфейса Drive наполнены специальными реализациями, построенными на CAN-сообщениях. Сверх того здесь присутствуют некоторые специфические переменные и методы. В данном случае это метод, устанавливающий CAN Id. Далее мы могли бы описать еще один вид привода, например аналоговый (AnalogDrive). В нём можно реализовывать методы совершенно иначе, чем для цифрового привода (CANDrive).
Теперь можно написать функциональный блок, получающий интерфейс в качестве параметра:
FUNCTION_BLOCK InitMove
VAR_INPUT
D: Drive;
Pos: INT;
END_VAR
VAR_OUTPUT
Done: BOOL;
END_VAR
IF Drive.Home() THEN
IF Drive.MoveAbsolute(Pos) THEN
Done := TRUE;
END_IF
END_IF
END_FUNCTION_BLOCK
Данный POU сможет работать с разными типами приводов, причём обратите внимание, что никакой их дифференциации в нём нет.
VAR
IM1, IM2: InitMove;
DriveCAN1: CANDrive;
DriveAna2: AnalogDrive;
END_VAR
DriveCAN1.SetCANId(12);
IM1(D := DriveCAN1, Pos := 100);
IM2(D := DriveAna2, Pos := 200);
Можно легко применять интерфейсы так же, как обычные типы данных, например, создавать массивы. Это позволяет использовать следующий приём:
VAR
AD: ARRAY[1..2] OF Drive;
DriveCAN1: CANDrive;
DriveAna2: AnalogDrive;
I: INT;
END_VAR
DriveCAN1.SetCANId(12);
AD[1] := DriveCAN1;
AD[2] := DriveAna2;
FOR I := 1 TO 2 DO
AD[I].Home();
END_FOR
Заключение
Может возникнуть вопрос: насколько целесообразны или даже допустимы описанные расширения действующего стандарта МЭК 61131-3?
Дело в том, что главное требование стандарта состоит в выполнении однозначно описанных в нём конструкций, без каких-либо отклонений. Это полностью применимо к функциональным блокам, которые сохраняют все свойства «нормальных» функциональных блоков, несмотря на все нововведения.
Вы могли заметить, что описанные расширения языков программирования МЭК 61131-3 уже есть в других современных языках, таких как Java или C#. Однако инструментов, созданных на их основе специально для решения задач автоматизации, нет. Кроме того, переход на эти языки не соответствует практическим требованиям прикладных программистов.
Наконец, мы сталкиваемся с вопросом: действительно ли программистам ПЛК нужна технология ООП? Наши исследования тысяч приложений, созданных в CoDeSys, показали, что уже сейчас многие программисты пытаются реализовать конструкции ООП в своих проектах. Имея дело с абстрактными приводами, сетями или агрегатами машин, они создают функциональные блоки с поведением, управляемым специальными флагами. Это указывает на растущую необходимость появления объектного подхода в мире автоматизации. Достаточно многие пользователи 3S пытаются самостоятельно компенсировать отсутствие ООП, прилагая значительные усилия, чтобы иметь возможность автоматически генерировать код для однотипных приложений. Некоторые же открыто призывают нас к добавлению объектно-ориентированных функций.
Мир ПК прошёл тот же позитивный путь развития. Так, популярность языка Basic, предназначенного для самого широкого круга программистов, значительно возросла после добавления в него ООП-расширений.
Популярность CoDeSys в области промышленной автоматизации такова, что можно гарантировать непрерывную доработку и развитие новых функций. Кроме того, 3S будет продвигать включение объектно-ориентированных расширений в стандарт МЭК 61131-3. ●
Dieter Hess — директор 3S-Smart Software Solutions GmbH
Телефон: (+49-831) 540-310
Факс: (+49-831) 540-3150
Перевод с немецкого Стефании Клёкнер,
Игоря Петрова
Телефон: (4812) 65-8171
Если вам понравился материал, кликните значок - вы поможете нам узнать, каким статьям и новостям следует отдавать предпочтение. Если вы хотите обсудить материал - не стесняйтесь оставлять свои комментарии : возможно, они будут полезны другим нашим читателям!





